![]()
Matrix Eyes is a Rust port of Apple Depth Pro project to convert a photo image into an autostereogram or 3D mesh.
For running ML models, the burn library is used. There's also an experimental version using candle in the candle tag.
The python tag contains an older Python-based version which supported both MiDaS and Apple Depth Pro depth estimation algorithms.
This app reuses some code from Cybervision, and tries to achieve the same goal. Cybervision uses a "classic" structure-from-motion approach and reconstructs objects from multiple views, while Matrix Eyes uses a pretrained machine learning model to add depth to a single image.
Source image:

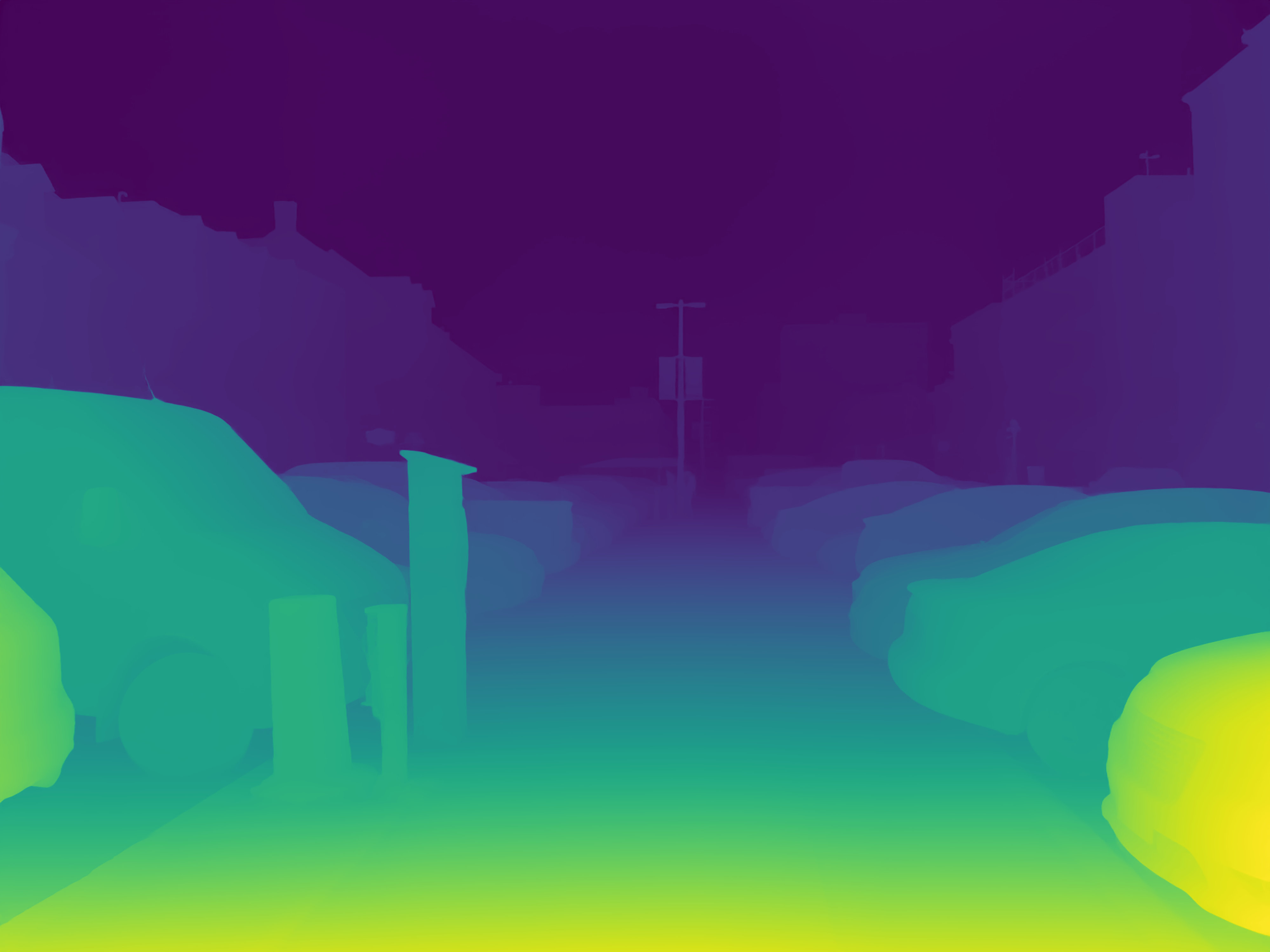
Depth data extracted by Matrix Eyes:
Generated stereogram - works best when viewed in fullscreen:
{kind=link}
Download a copy of Matrix Eyes from Releases and extract it into in a directory. The following versions are available:
- Windows
- ndarray (slow, CPU-only version)
- candle-cuda (fastest version, using the candle backend and cuDNN libraries)
- wgpu-spirv (vendor-neutral GPU version, fails to run on a GPU with 8GB of VRAM)
- Ubuntu
- ndarray (slow, CPU-only version)
- candle-cuda (not tested)
- wgpu-spirv (not tested)
- macOS
- wgpu-spirv (wgpu version, uses 12+ GB when running)
- ndarray-accelerate (slow, CPU-only version that might be using AMX instructions)
For the Windows CUDA version, download the CUDA libraries artifact and extract its contents into the same directory.
Download the model checkpoints:
mkdir checkpoints
curl -LJ -o checkpoints/depth_pro.pt https://ml-site.cdn-apple.com/models/depth-pro/depth_pro.ptTo gerate a depth image, run:
matrix-eyes [--focal-length=<focal-length>] [--checkpoint-path=<checkpoint-path>] [--image-output-format=<depthmap|stereogram>] [--resize-scale=<scale>] [--stereo-amplitude=<amplitude>] [--mesh=<plain|vertex-colors|texture-coordinates>] [--convert-checkpoints] <source> <output>--focal-length=<focal-length> is an optional argument to specify a custom focal length for images with perspective projection, for example, --focal-length=26;
this should be the image's focal length in 35mm equivalent.
If not specified, EXIF metadata will be used; if EXIF data is not available, the focal length will be estimated using Depth Pro.
--checkpoint-path=<checkpoint-path> is an optional argument to specify a custom path to the Depth Pro checkpoints file, --checkpoint-path=./ckpoint.pt.
--image-output-format=<depthmap|stereogram> is an optional argument to specify the image output format, for example --image-output-format=depthmap or --image-output-format=stereogram.
depthmap (the default option) outputs a depth map image, while --image-output-format=stereogram outputs a stereogram image.
--resize-scale=<scale> is an optional argument to specify a custom scale for the stereogram image output, for example --resize-scale=0.25.
This can help with making noise pixels large enough to be visible.
--stereo-amplitude is an optional argument to specify the maximum offset/depth for stereograms (relative to image width); might need to be reduced if most of the image consists of foreground objects, for example --stereo-amplitude=0.0625.
--mesh=<plain|vertex-colors|texture-coordinates> is an optional argument to specify how to output OBJ and PLY meshes mode, for example --mesh=vertex-colors or --mesh=texture-coordinates.
plain (the default option) outputs the mesh without any color or texture, vertex-colors outputs the mesh with colors assigned to every vertex, and texture-coordinates will add texture coordinates.
--convert-checkpoints will convert checkpoints from a .pt (Python pickle) format into a more efficient Burn format.
<source> specifies the filename for the source file; supported formats are jpg and png.
<output> is the output filename:
- If the filename ends with
.obj, this will save a 3D Wavefront OBJ file. - If the filename ends with
.ply, this will save a 3D PLY binary file. - If the filename ends with
.png, this will save a PNG image (depth map or stereogram). - If the filename ends with
.jpg, this will save a JPEG image (depth map or stereogram).
Matrix Eyes was tested to support CPU-only and GPU-accelerated processing on:
- Apple Macbook Pro M1 Max (2021) (ndarray-accelerate, ndarray and wgpu versions)
- Windows 11, i7-11800H, Geforce RTX 3070 (candle-cuda and ndarray versions)
- Fedora 41 in WSL (ndarray version)