Autonomous MAV(drone) flying through gates in a Gazebo framework
- ros complete installation(https://wiki.ros.org/noetic/Installation/Ubuntu)
- rotors simulator ROS package(https://github.com/ethz-asl/rotors_simulator)
- mav messages package(https://github.com/ethz-asl/mav_comm)
- It uses OpenCV, numpy and scipy. These are usually installed together with ROS, but in case they aren't installed or deleted, they are added to
requirements.txt
Building is same as for any other ROS package
- Build packages
catkin build - Source
source devel/setup.bash
-
Run the simulator
roslaunch mav_race mav_gates.launch -
Move to initial point by publishing ros message
rostopic pub /firefly/command/pose geometry_msgs/PoseStamped "header: seq: 0 stamp: secs: 0 nsecs: 0 frame_id: '' pose: position: x: -1.0 y: -2.0 z: 3.5 orientation: x: 0.0 y: 0.0 z: 0.0 w: 0.0" -
After robot reaches the desired position(3-5 seconds maximum) run the node which flies through gates:
rosrun mav_race gate_processer.py
In short time after running gate_processer.py it should start flying through gates. It should stop near the last gate.
There are might be some bugs, in case of abnormal behavior it is recommended to restart everything.
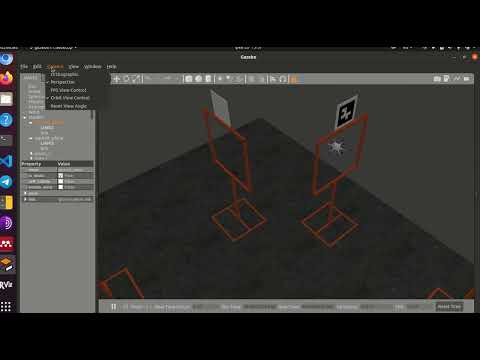
The overall approach relies on aruco markers and depth camera for gate positions estimation. The ArucoDetector class detects markers, whereas ArucoTracker performs tracking and path planning. In order to achieve smooth trajectory Cubic spline interpolation is used for both: position and orientation.
Odometry is taken as ground-truth, but there is also second launch file mav_gates_noisy.launch, which uses corrupted odometry, corruption is done by adding normal noise to position and orientation. Running might be done in exactly same way: roslaunch mav_race mav_gates_noisy.launch. Most of the time it works, but with less stability.