CPS_continuous_plant
In this example a unicycle type mobile robot is simulated using the hybrid system toolbox. It is assumed that the forward velocity can be either 1 or 0, and the control command is
The files for this example are found in the package hybrid.examples.mobile_robot :
- initialize.m
- mobile_robot.slx
- postprocess.m
The contents of this package are located in Examples\+hybrid\+examples\mobile_robot (clicking this link changes your working directory).
A unicycle mobile robot is a continuous-time nonlinear system. Let
where the forward velocity
The following diagram shows the Simulink model for this example. The mobile robot is represented by the Continuous-time Plant block.

A Continuous-time Plant block contains user-defined a
flow map
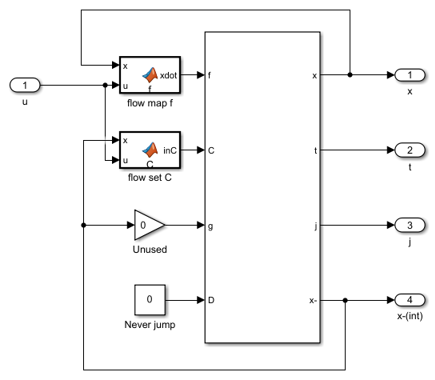
The flow map and flow set functions in this example are included below.
flow map f block
function xdot = f(x, u)
% Flow map for plant.
xdot = [sin(x(3)); cos(x(3)); u];
end
flow set C block
function inC = C(x, u, parameters)
% Flow set indicator function for plant.
x1 = x(1);
x2 = x(2);
minU = parameters.minU;
maxU = parameters.maxU;
maxX = parameters.maxX;
if u >= minU && u <= maxU && x1^2+x2^2 <= maxX^2
inC = 1; % report flow
else
inC = 0; % do not report flow
end
end
The jump set C block is given as a constant block with value zero and the jump map D block is unused.
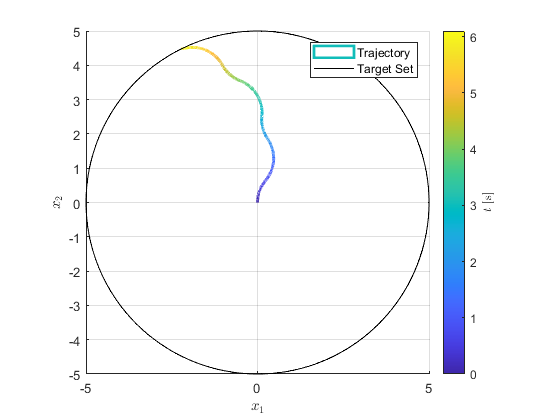
The following plot shows a solution to the closed-loop system. The robot starts at the origin and then drives until it eventually hits the target set, which is a circle with radius 5 centered at the origin.