Projekt zrealizowany w ramach pracy inżynierskiej "Projekt Systemu Monitoringu Pozycji Obiektów Mobilnych" na kierunku Mechatronika na Wojskowej Akademii Technicznej.
- Opracowanie wymagań technicznych
- Opracowanie koncepcji budowy
- Wykonanie modelu fizycznego systemu
- Opracowanie dokumentacji
Wersja demonstracyjna dostępna jest pod adresem: https://nittrack.pl/
użytkownik: demo
hasło: demo
Na system składa się:
- jednostka lokalizacyjna,
- serwer,
- użytkownik.
Jednostka lokalizacyjna składa się z mikrokontrolera oraz modułów:
- modułu GPS,
- modułu GSM.
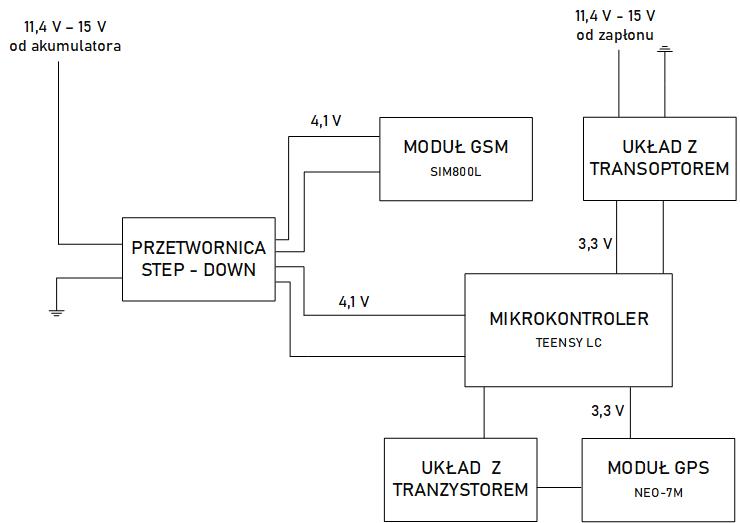
Jednostka wpięta jest w instalację elektryczną pojazdu przy pomocy przetwornicy impulsowej zmieniającej napięcie akumulatora na niższe. Jeśli zapłon pojazdu jest włączony, jednostka wysyła na serwer pozycje w interwałach około 20 sekund. Wyłączenie zapłonu powoduje przejście w tryb zmniejszonego poboru energii. Pozycje nie są wtedy wysyłane. Powrót do stanu monitorowania odbywa się po włączeniu zapłonu lub po wysłaniu SMSa "ON". Możliwe jest również chwilowe wybudzenie jednostki w celu jednokrotnego wysłania pozycji (SMS o treści "PULL"). Serwer przetwarza i przechowuje dane oraz pozwala na wyświetlanie aplikacji użytkownika w przeglądarce.
Do działania jednostki konieczna jest ingerencja w instalację elektryczną pojazdu. Jednostka zostaje podłączona do zasilania z akumulatora, konieczne jest również podłączenie do mikrokontrolera tzw. „zapłonu”. Włączenie zapłonu jest jednoznaczne z wysłaniem sygnału sterującego na wejście cyfrowe mikrokontrolera. Aby jednak możliwa była poprawna praca urządzenia, zarówno napięcie zasilania, jak i sygnał zapłonu musi być zmniejszony do wartości nominalnych mikrokontrolera oraz modułu GSM. Moduł GSM, w przeciwieństwie do modułu lokalizacyjnego, nie jest zasilany bezpośrednio z mikrokontrolera, ponieważ jego maksymalny pobór prąd może chwilowo sięgać nawet 2 A, co mogłoby spowodować uszkodzenie mikrokontrolera, w którym maksymalny prąd wyprowadzeń wynosi 20 mA. W związku z tym, do zasilania tych elementów wykorzystany został układ obniżający napięcie – uniwersalna przetwornica impulsowa LM-2956 z regulowanym napięciem wyjściowym – w przypadku omawianego układu napięcie wyjściowe zostało ustalone na około 4,1 V, a więc mieści się w dopuszczalnych zakresach obydwu urządzeń. Dodatkowo przed modułem GSM został połączony równolegle kondensator 220 µF, którego zadaniem jest filtracja zasilania.
Wejścia cyfrowe w płytce Teensy LC pracują w logice 3,3 V, aby więc możliwe było skorzystanie z napięcia na „zapłonie” jako stanu wysokiego na wejściu cyfrowym, zastosowany został układ z transoptorem, dzięki któremu układ elektroniczny mikrokontrolera jest odseparowany od instalacji elektrycznej samochodu, a mimo to pozwala na sterowanie wyprowadzeniem cyfrowym. Układ ten składa się z transoptora PC817, z którym po stronie fotoemitera szeregowo połączony jest rezystor 2,2 kΩ oraz dioda prostownicza 1N4148, która służy jako zabezpieczenie przed spaleniem diody transoptora w przypadku ojawienia się odwrotnej polaryzacji. Kolektor fototranzystora połączony jest z wyprowadzeniem 3,3 V z mikrokontrolera, a emiter z wyprowadzeniem cyfrowym nr 15 oraz przez rezystor 10 kΩ z masą mikrokontrolera. Kiedy więc użytkownik uruchomi zapłon pojazdu, transoptor pozwoli na przepływ prądu obwodu wyjściowego, ustalając tym samym stan wysoki na pinie nr 15, który obsługuje przerwanie zmieniające tryb pracy urządzenia.
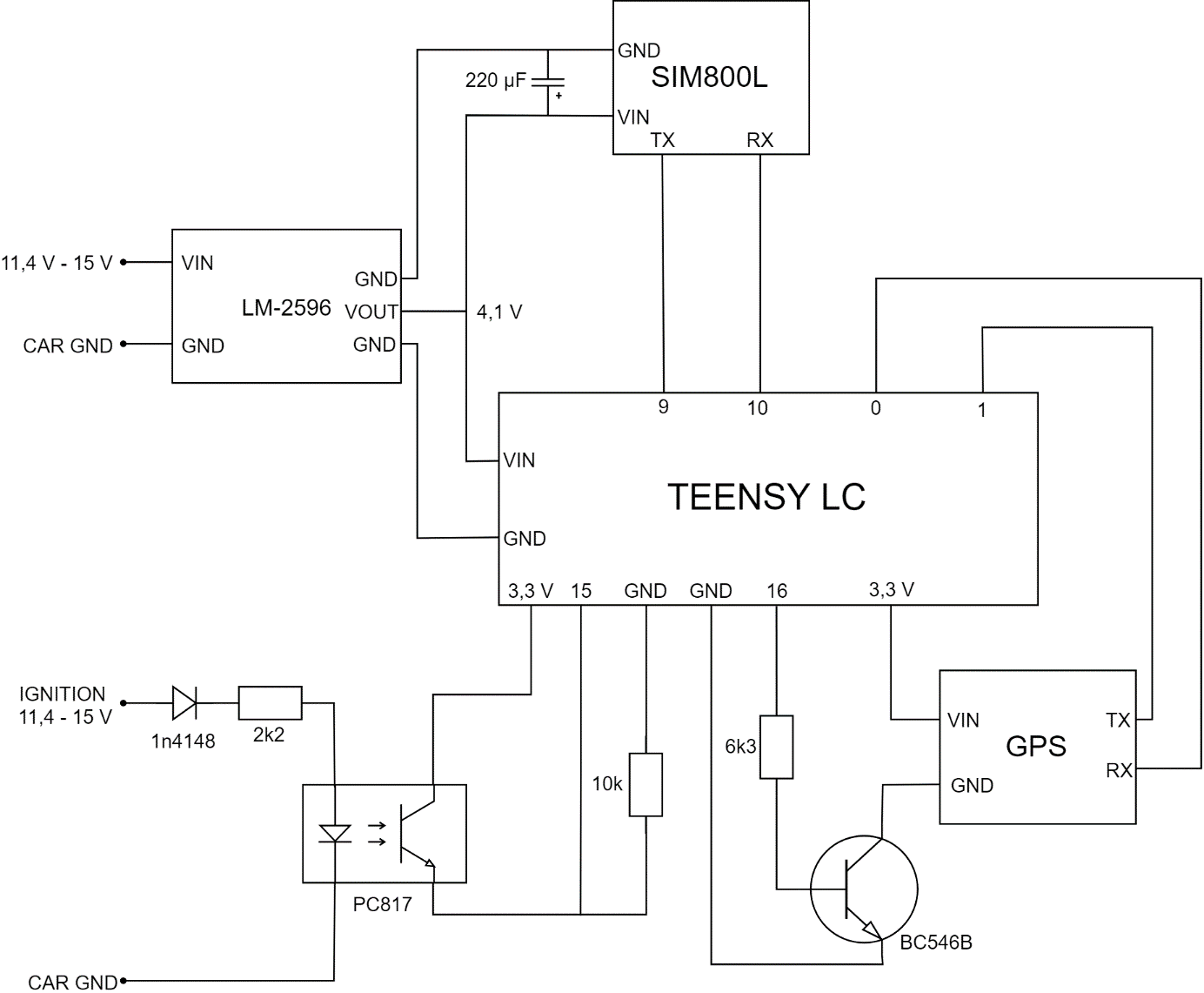
Moduł GPS zasilany jest z wyprowadzenia 3,3 V mikrokontrolera poprzez układ z tranzystorem. Zadaniem tranzystora jest uruchamianie bądź wyłączanie modułu w zależności od stanu pinu cyfrowego nr 16, który poprzez rezystor 6,3 kΩ połączony jest z bazą tranzystora. Kolektor połączony jest z masą modułu GPS, a emiter z masą mikrokontrolera. Umożliwia to sterowanie zasilaniem modułu z poziomu programu – stan wysoki na pinie 16 powoduje przepływ prądu w obwodzie zasilając tym samym moduł GPS.
Komunikacja pomiędzy modułami GSM i lokalizacyjnym a mikrokontrolerem odbywa się za pomocą interfejsu szeregowego. Mikrokontroler Teensy LC posiada 3 niezależne porty szeregowe i każdy z nich ma przypisane konkretne numery pinów na płytce. Moduł GPS podłączony jest do portu Serial 1, czyli pinów o numerach 0 i 1, natomiast moduł GSM do portu Serial 2, czyli pinów 9 i 10.
W celu wykonania jednostki została zaprojektowana płytka PCB realizująca powyższe schematy, do której zostały dolutowane wszystkie wymagane elementy:
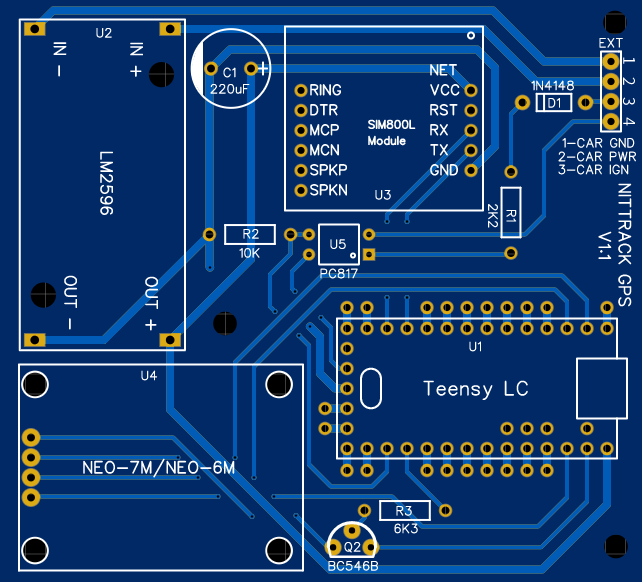
Płytka została zaprojektowana przy pomocy programu EasyEDA i wykonana w firmie JLCPCB.
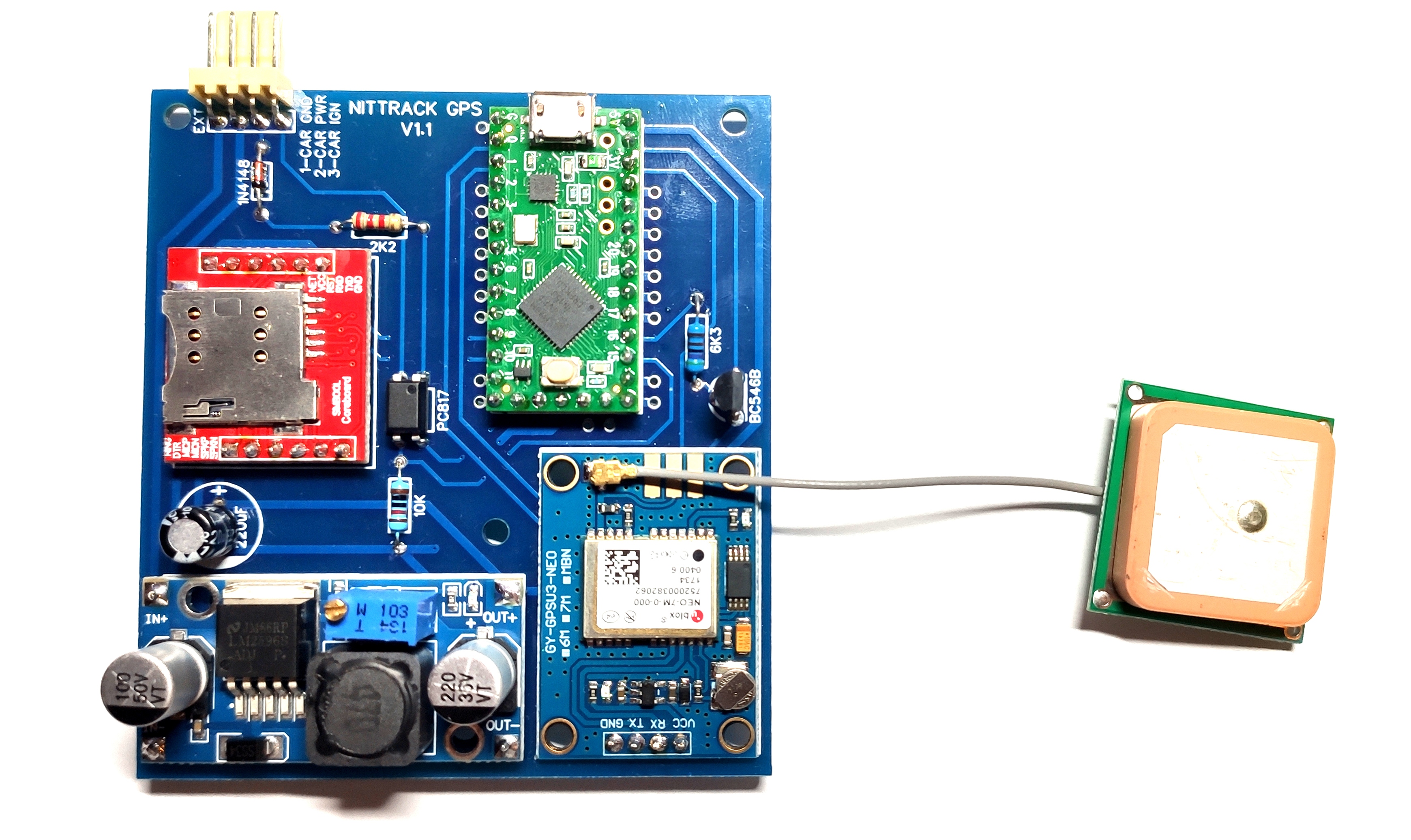
W oparciu o zaprojektowaną płytkę został wykonany funkcjonalny prototyp urządzenia (wcześniej urządzenie łączane było przewodami oraz przy pomocy polutowanej płytki uniwersalnej):
Aplikacja użytkownika została opracowana przy pomocy czystego HTML+CSS, JavaScripta(jQuery, Leaflet), oraz PHP. Baza danych: MariaDB.
Od strony użytkownika aplikacja składa się z następujących podstron:
- Strona logowania - login.php
- Strona główna - index.php
- Raporty - reports.php
- Urządzenie - device.php
- Informacje o systemie - info.php
- Kontakt - contact.php
- FAQ - help.php
Dodatkowo aplikacja zawiera szereg skryptów backendowych:
- connect.php - połączenie z bazą danych
- convert.php, convert2.php - konwertowanie danych na GeoJSON
- dodaj.php - zapisywanie pozycji z jednostki lokalizacyjnej
- get_login.php - obsługa logowania
- get_report.php - obsługa raportów
- logout.php - wylogowywanie
- submit.php - obsługa wyświetlania pozycji na mapie
Projekt używany jest w celach prywatnych.