In this project, we build a Tennisball Picker Robot based on a BOE-BOT car built from Lab12.
For more detail information are written in proposal pptx. FYI.
Proposal.pptx

- Build a BOE-BOT car. Please refer to: mbed Lab12
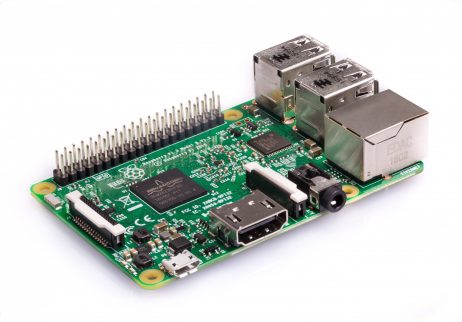
- Prepare a Raspberry Pi 3 Model B borad. [Official site]
(https://www.raspberrypi.org/products/raspberry-pi-3-model-b/)
- A tennis ball
- A Web Camera
-
Please login in gitlab, clone and prepare a working directory.
$ git clone [email protected]:104061203/midterm_project.git$ cd midterm_project/
-
Build the car like this:

- 1: Standard Servo.
{5V: 5V , SIG: D5, GND: GND} - 2: Standard Servo.
{5V: 5V , SIG: D6, GND: GND} - 3: Standard Servo.
{5V: 5V , SIG: D9, GND: GND} - 4: Standard Servo.
{5V: 5V , SIG: D10, GND: GND}
- 1: Standard Servo.
-
Add Parallax Library to the project directory
$ mbed add http://gitlab.larc-nthu.net/embedded_lab/parallax
-
Start VS Code to edit
main.cpp$ code main.cpp &
-
Copy the following codes into
main.cpp. We use the following codes to build the Controller Of the Car#include "mbed-os/mbed.h" #include "parallax/parallax.h" double SERVO_CONTROL_DELAY = 0.1f; Serial pc(USBTX, USBRX); Serial rpi(D1, D0); PwmOut left_servo_pin(D11), right_servo_pin(D12); PwmOut left_shoulder_pin(D5), right_shoulder_pin(D6); PwmOut left_wrist_pin(D9), right_wrist_pin(D10); parallax_servo *left_servo, *right_servo; parallax_stdservo *left_shoulder, *right_shoulder, *left_wrist, *right_wrist; void car_set_speed(int, int); void arm_set_init(); void catch_the_ball(); void init(){ left_servo = new parallax_servo(left_servo_pin); right_servo = new parallax_servo(right_servo_pin); servo_ticker.attach(&servo_control, .5); wait(5); car_set_speed(0, 0); arm_set_init(); pc.baud(115200); rpi.baud(38400); } void flushSerialBuffer(void) { char char1 = 0; while (pc.readable()){ char1 = pc.getc(); } return; } int main(void){ init(); while(1){ while(rpi.readable()){ char c = rpi.getc(); flushSerialBuffer(); pc.printf("%d\n\r", c); if (c == 'w'){ car_set_speed(50, 50); } else if (c == 'b'){ car_set_speed(-20, -20); } else if (c == 'l'){ car_set_speed(-20, 20); } else if (c == 'r'){ car_set_speed(20, -20); } else if (c == 'c'){ car_set_speed(0, 0); catch_the_ball(); } else { car_set_speed(0, 0); } } } } void catch_the_ball(){ int i; for (i = (-90); i <= 20; i+=5){ *left_shoulder = i; wait(0.05f); *right_shoulder = 0 - i; wait(0.05f); // printf("%d\n\r", i); } wait(1); *left_wrist = 20; wait(0.5); *right_wrist = -20; wait(1.5); for (i = (-90); i <= 20; i+=){ *left_wrist = i; *right_wrist = 0 - i; wait(0.02f); } *left_shoulder = -90; *right_shoulder = 90; wait(1); for (i = 90; i--; i > -90){ *left_wrist = i; *right_wrist = 0 - i; wait(0.01f); } *left_wrist = 90; *right_wrist = -90; wait(5); } void arm_set_init(){ *left_shoulder = (-90); *right_shoulder = (90); *left_wrist = 90; *right_wrist = -90; } void car_set_speed(int left, int right){ *left_servo = left; *right_servo = 0 - right; wait(SERVO_CONTROL_DELAY); }
-
Compile the program.
- Use Micro USB transfer line to connect K64F to computer.
$ ls /dev/ttyACM*You should see a result:/dev/ttyACM0(on Ubuntu)$ sudo mbed compile -m K64F -t GCC_ARM -f- After compiling, please press reset button to initialize the K64F.

- Setup a Raspberry Pi 3 board.
- Install an OS(Raspbian) on board. FYI:Install an Operating System On Linux
- Login to Raspbian OS, and set WIFI to connect the same host. (same local network)
- Install necessary packages:
$ sudo apt-get update$ sudo apt-get install -y git python3-dev$ sudo apt-get install -y python3-pip
- Please login in gitlab, clone and prepare a working directory.
$ mkdir -p ~/midterm && cd ~/midterm$ git clone [email protected]:104061203/midterm_project_raspberry.git$ cd midterm_project_raspberry/
- Install necessary Python packages:
$ pip3 install numpy pyserial opencv-python
- Start VS Code to edit
main.py$ code main.py
- Copy the following codes into
main.py. The following codes is to built the Ball-Detection Program and K64F Controller.import cv2 import numpy as np import math import time import serial k64f = serial.Serial('/dev/ttyAMA0') k64f.baudrate = 38400 cap = cv2.VideoCapture(0) STATE = ('IDLE', 'SCAN', 'FOUND', 'READY', 'CATCH') ACTION = { 'Forward': "w", 'Backward': "b", 'Left': "l", 'Right': "r", 'Stop': "s", 'Catch': "c" } RADIUS_THRESHHOLD = 30 SCAN_DELTA_LIMIT = 100 SCAN_OK_FRAMES_LIMIT = 5 FOUND_CENTER_X = 280 FOUND_ERROR_X = 80 TENNIS_UPPER = (50, 210, 255) TENNIS_LOWER = (25, 40, 50) currentFrame = 0 currentState = STATE[1] lastCenter = (0, 0) def move(command=ACTION['Stop']): k64f.write(command.encode()) print(len(command.encode())) time.sleep(0.15) k64f.write(ACTION['Stop'].encode()) while(True): ret, frame = cap.read() img = frame hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) mask = cv2.inRange(hsv, TENNIS_LOWER, TENNIS_UPPER) mask = cv2.erode(mask, kernel=np.ones((5, 5), np.uint8), iterations=1) mask = cv2.dilate(mask, None, iterations=3) contours = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2] if len(contours) > 0: c = max(contours, key=cv2.contourArea) ((x, y), radius) = cv2.minEnclosingCircle(c) if radius > RADIUS_THRESHHOLD: ## circle avaliable in view M = cv2.moments(c) try: center = (int(M["m10"] / M["m00"]), int(M["m01"] / M["m00"])) except Exception: pass if currentState is 'SCAN': print('Current Status: SCANING...') move(ACTION['Forward']) distance = math.sqrt((center[0]-lastCenter[0])**2 + (center[1]-lastCenter[1])**2) print("distance: ", distance) if distance > SCAN_DELTA_LIMIT: lastCenter = center scanOkFrames = 0 else: scanOkFrames += 1 if scanOkFrames >= SCAN_OK_FRAMES_LIMIT: currentState = 'FOUND' scanOkFrames = 0 elif currentState is 'FOUND': print('Current Status: Found a ball! Attempt to approach it...') center_x, center_y = center[0], center[1] if center_x < FOUND_CENTER_X - FOUND_ERROR_X: move(ACTION['Left']) print("move left") elif center_x > FOUND_CENTER_X + FOUND_ERROR_X: move(ACTION['Right']) print("move right") elif radius > 190: move(ACTION['Backward']) print("back") elif radius < 160: move(ACTION['Forward']) print("forward") else: move(ACTION['Stop']) currentState = 'READY' elif currentState is 'READY': print('Current Status: Ready to catch the ball!') move(ACTION['Stop']) move(ACTION['Catch']) print('Current Status: Catch!') time.sleep(5) currentState = 'SCAN' print(radius) ## for debug elif currentState == 'FOUND': move(ACTION['Backward']) if cv2.waitKey(1) & 0xFF == ord('q'): break cap.release() cv2.destroyAllWindows()
- Plug the Web Camera on Raspberry Pi board
- Run
main.pyto start the script.$ sudo python3 main.py