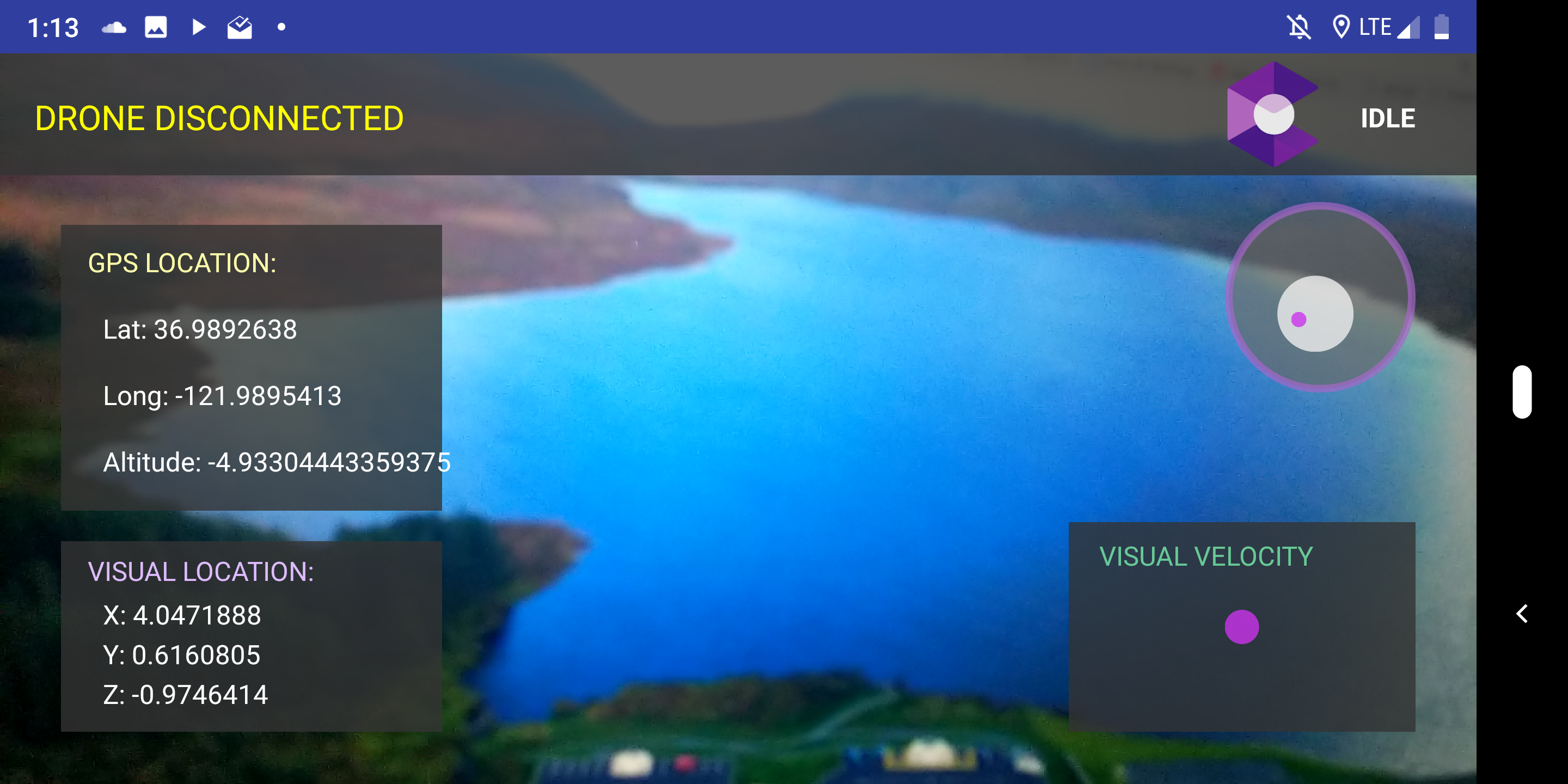
This is the Android control app for the in-progress Fleur hoverdrone project.
The Fleur project aims to create a working electric hoverdrone capable of manned flight.
The current design is capable of a theoretical half hour of flight time at near sea level with a 200 lb load.
The Fleur Control Android app directly interfaces with the hoverdrone hardware through the IOIO-OTG V2 microcontroller.
This app utilizes various strategies to obtain precise, accurate, and low-latency position and rotation estimates.
- On modern devices, this is accomplished effectively with ARCore, which combines sensor and camera inputs for an accurate 60fps position estimate.
- For older devices, the app can revert to OpenCV's optical flow implementation along with gyro/accelerometer sensor fusion.
- Overall location is integrated over time with GPS position to enable navigation and "return-to-home" features.