Myth : RTC (Real Time computing) is fast computing with higher performance
Truth : RTC is predictable computing , timeliness is more important than perfomance.
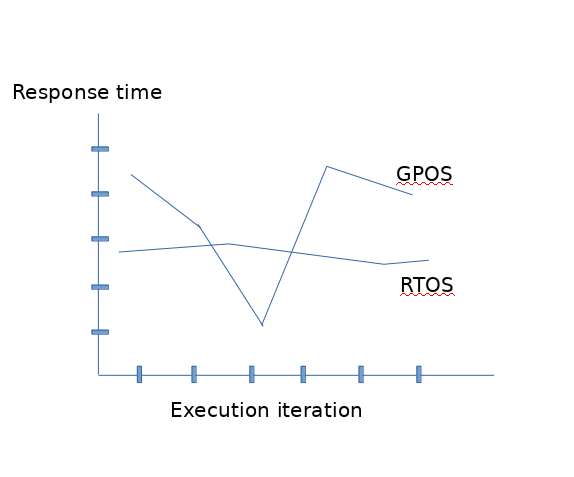
- RTOS deals with gurantees , not with raw speed . having more processor , more RAM ,faster BUS interfaces does't make a system real time , it deals with GUARANTEES
-
Interrupt & Context switch
-
Preemption
-
Latency
-
Jitter
-
Faster
-
Linux mainline kernel was not designed as RTOS
-
FreeRTOS : FreeRTOS is a class of RTOS that is designed to be small enough to run on a microcontroller - although its use is not limited to microcontroller applications.
-
QNX : QNX is real time RTOS, which support ARM, MIPS, PowerPC, SH and X86 Processor family.
-
Vxworks :Vxworks is also real time rtos, it support wide range of processor architectures like ARM, PowerPC, ColdFire, MIPS etc.
-
RTlinux :RTLinux is a hard realtime real-time operating system (RTOS) microkernel that runs the entire Linux operating system as a fully preemptive process. The hard real-time property makes it possible to control robots, data acquisition systems, manufacturing plants, and other time-sensitive instruments and machines from RTLinux applications. Even with a similar name it is not related the Real-Time Linux project of the Linux Foundation.
-
ChibiOS/RT: is designed for embedded applications on 8, 16 and 32 bit microcontrollers; size and execution efficiency are the main project goals.[2] As reference, the kernel size can range from a minimum of 1.2 Kib up to a maximum of 5.5 KiB with all the subsystems activated on a STM32 Cortex-M3 processor. The kernel is capable of over 220,000 created/terminated threads per second and is able to perform a context switch in 1.2 microseconds on an STM32 @ 72 MHz. Similar metrics for all the supported platforms are included in the source distribution as test reports.
- Efficient and portable preemptive kernel.
- Best in class context switch performance.
- Many supported architectures and platforms.
- Static architecture, everything is statically allocated at compile time.
- Dynamic extensions, dynamic objects are supported by an optional layer built on top of the static core.
- Rich set of primitives: threads, virtual timers, semaphores, mutexes, condition variables, messages, mailboxes, event flags, queues.
- Support for priority inheritance algorithm on mutexes.
- Hardware Abstraction Layer (HAL) component supporting a variety of abstract device drivers: Port, Serial, ADC, CAN, EXT, GPT, I2C, ICU, MAC, MMC, PWM, RTC, SDC, SPI, UART, USB, USB-CDC.
- Support for external components uIP, lwIP, FatFs.
- Extensive test suite with benchmarks.
- Support for C++ applications.
github :https://github.com/ChibiOS/
-
Arduino UNO (ATmega328P 8-bit μc) OS: FreeRTOS lib:https://github.com/feilipu/Arduino_FreeRTOS_Library
- Example 1 [blink AnalogRead]
- Example 2 [ultrasonic sensor response at Real time]
-
Raspberry Pi 3 Model B+
OS :RTlinux
$ https://github.com/raspberrypi/tools.git$ git clone -b rpi-3.18.9-rt5 https://github.com/emlid/linux-rt-rpi.git$ cd Linux-rt-rpi$ export ARCH=arm$ export CROSS_COMPILE=~/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/arm-linux-gnueabihf$ make bcm2709_rt_defconfig$ make -j5$ mkdir kernel-rt$ INSTALL_MOD_PATH=kernel-rt make modules_installgit clone git://git.kernel.org/pub/scm/linux/kernel/git/clrkwllms/rt-tests.gitcd rt-testsmake allsudo cp ./cyclictest /usr/bin/cd ~sudo cyclictest -l1000000 -m -n -a0 -t1 -p99 -i400 -h400 -q