{kind=link}
{kind=link}
The Glove Project is a project that started when I found out about the use of flex sensors (Sensors that use electricity to sense if they are flexed through a small film surrounded by two metal prongs).
From there I thought of the use of these sensors in communication, specifically using them partnered with a glove to allow communication through the use of hand movements and positioning. I then created multiple versions of the project, each improving upon the last version of the project.
Though developing the multiple variations of the Glove Project I ended up reaching out to The University of Newcastle and working with an Associate Lecturer (Dr Jacqueline Bailey, School of Information and Physical Sciences), Associate Professor (Associate Professor Kiwako Ito, School of Humanities, Creative Ind and Social Sci), and Senior Lecturer (Dr Alexandre Mendes, School of Information and Physical Sciences), as well as The University of Newcastle’s NuBots team. They helped me refine my idea and I ended up developing it further with their assistance.
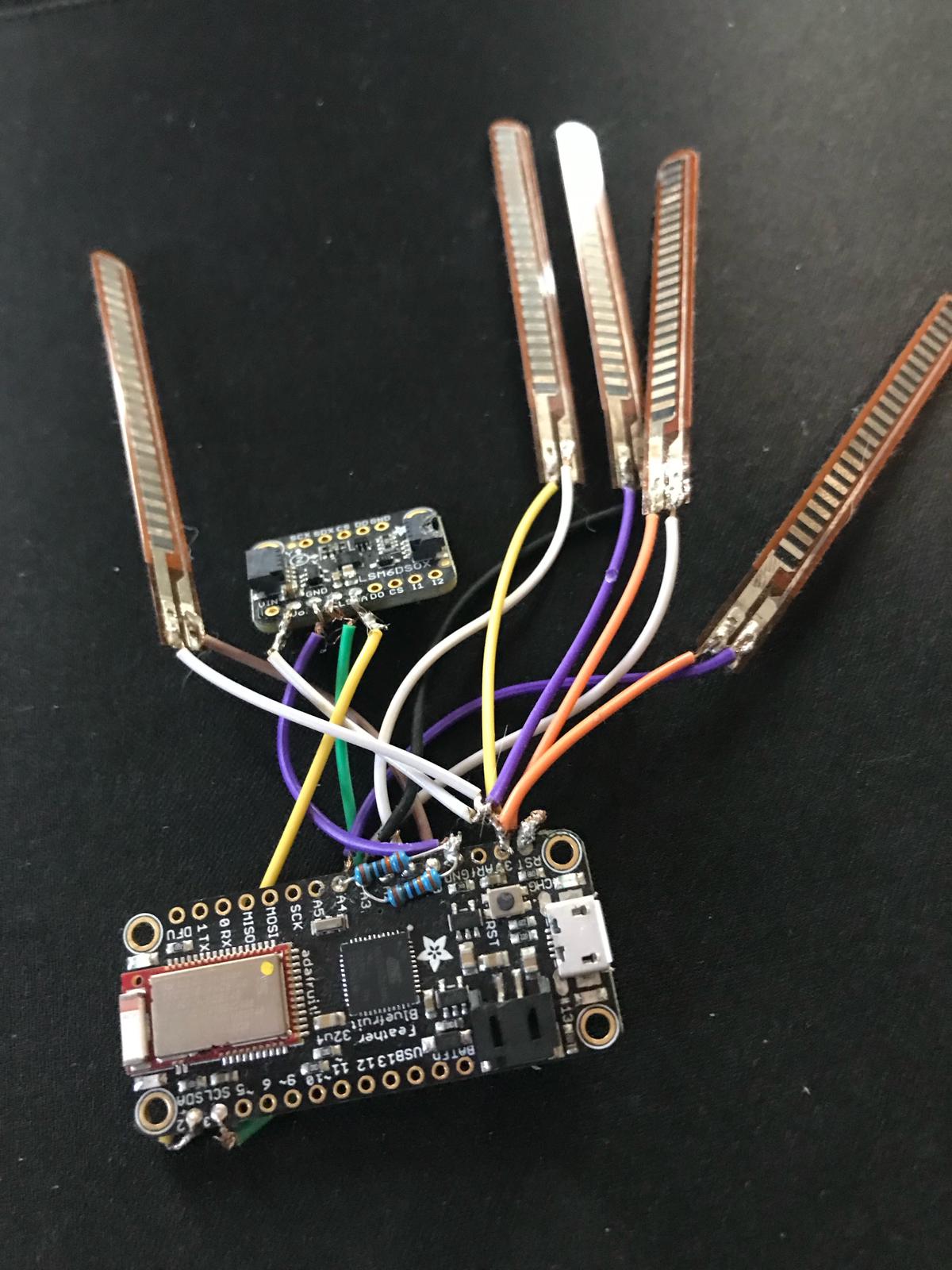
A Previous working version of the Glove Project runs off a Adafruit Bluefruit 32uF Microcontroller, that connects with an Accelerometer and Gyroscopic Sensor (the Adafruit LSM6DS0X 6 DoF Accelerometer and Gyroscope) and 5 flex sensors. The main draw back of this design is that it requires and external device to communicate at it has no working speakers connected.
The newest version improves upon this design however it isn’t fully functional yet due to an error in the creation of the hardware, leading to the software of the main computer, the Raspberry Pi Zero W, not being able to connect with the ADC (Analog to Digital Converter) board nor the Digital Speaker Module (Adafruit I2s Class D Breakout Amplifier).
