![]()
![]()
standard_robot_pp_ros2 是配合 StandardRobot++ 下位机控制使用的机器人驱动,提供了机器人的控制接口、数据接口。
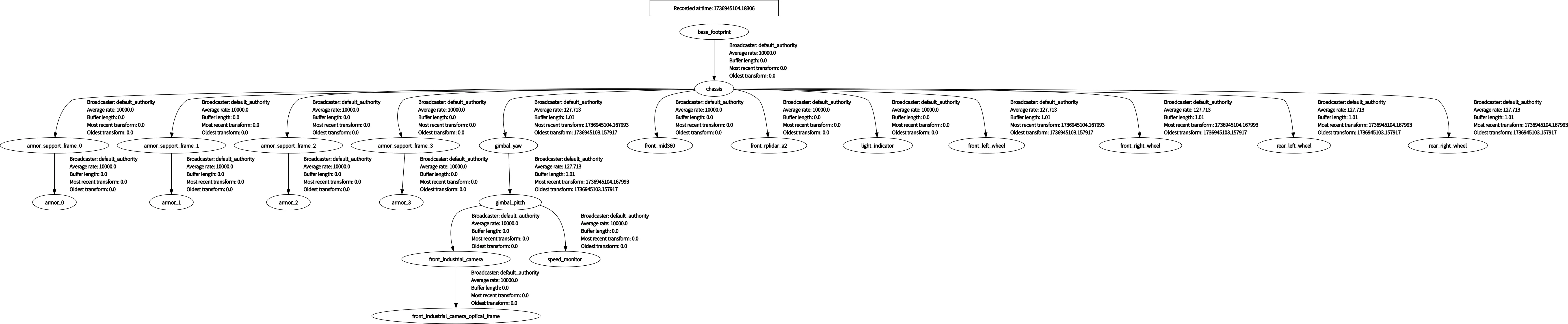
本项目获取下位机的 packet 并发布为 topic,并将下位机处理后的动态关节信息数据发布到 joint_states 话题,通过 joint_state_publisher 和 robot_state_publisher 建立整车 TF 树(包含 static 和 dynamic)。
| 字段 | 长度 (Byte) | 备注 |
|---|---|---|
| frame_header | 4 | 帧头 |
| time_stamp | 4 | 时间戳(基于下位机运行时间) |
| data | n | 数据段 |
| checksum | 2 | 校验码 |
| 字段 | 长度 (Byte) | 备注 |
|---|---|---|
| sof | 1 | 数据帧起始字节,固定值为 0x5A |
| len | 1 | 数据段长度 |
| id | 1 | 数据段id |
| crc | 1 | 数据帧头的 CRC8 校验 |
详见飞书文档 上下位机串口通信数据包
-
Ubuntu: 22.04
-
ROS2: Humble
-
进入 ROS2 工作空间的 src 目录
cd $YOUR_ROS_WS/src -
克隆本仓库
git clone https://github.com/SMBU-PolarBear-Robotics-Team/standard_robot_pp_ros2.git
-
获取本仓库依赖项
-
在
$YOUR_ROS_WS/src中克隆 Gthub 仓库依赖项:sudo apt install python3-vcstool vcs import --input standard_robot_pp_ros2/.github/dependency.repos
请查看 vcs 导入的子仓库的 README,并按照其说明 递进地安装子仓库的依赖项。
-
在
$YOUR_ROS_WS中运行命令以获取打包的依赖项:rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
-
-
配置 udev,用来定向下位机 RoboMaster C 型开发板串口硬件并给予串口权限
本命令在一台主机中只需要运行一次,无需重复运行。
./script/create_udev_rules.sh
-
构建程序
colcon build --symlink-install
-
运行上下位机通讯
Tips: 如需开启 RViz 可视化,请添加
use_rviz:=True参数。ros2 launch standard_robot_pp_ros2 standard_robot_pp_ros2.launch.py
串口通信部分参考了 rm_vision - serial_driver,通信协议参考 DJI 裁判系统通信协议。