![]()
SMBU PolarBear Team robot description package for RoboMaster 2025.
深圳北理莫斯科大学北极熊战队 - RoboMaster 2025 赛季通用机器人关节描述包。
本功能包含深圳北理莫斯科大学北极熊战队用于 RoboMaster 赛事的机器人关节描述文件。它将读取机器人描述文件并转换为 TF 和 joint_states ,以便与其他 ROS2 节点配合使用。
本项目使用 xmacro 格式描述机器人关节信息,可以更灵活的组合已有模型。
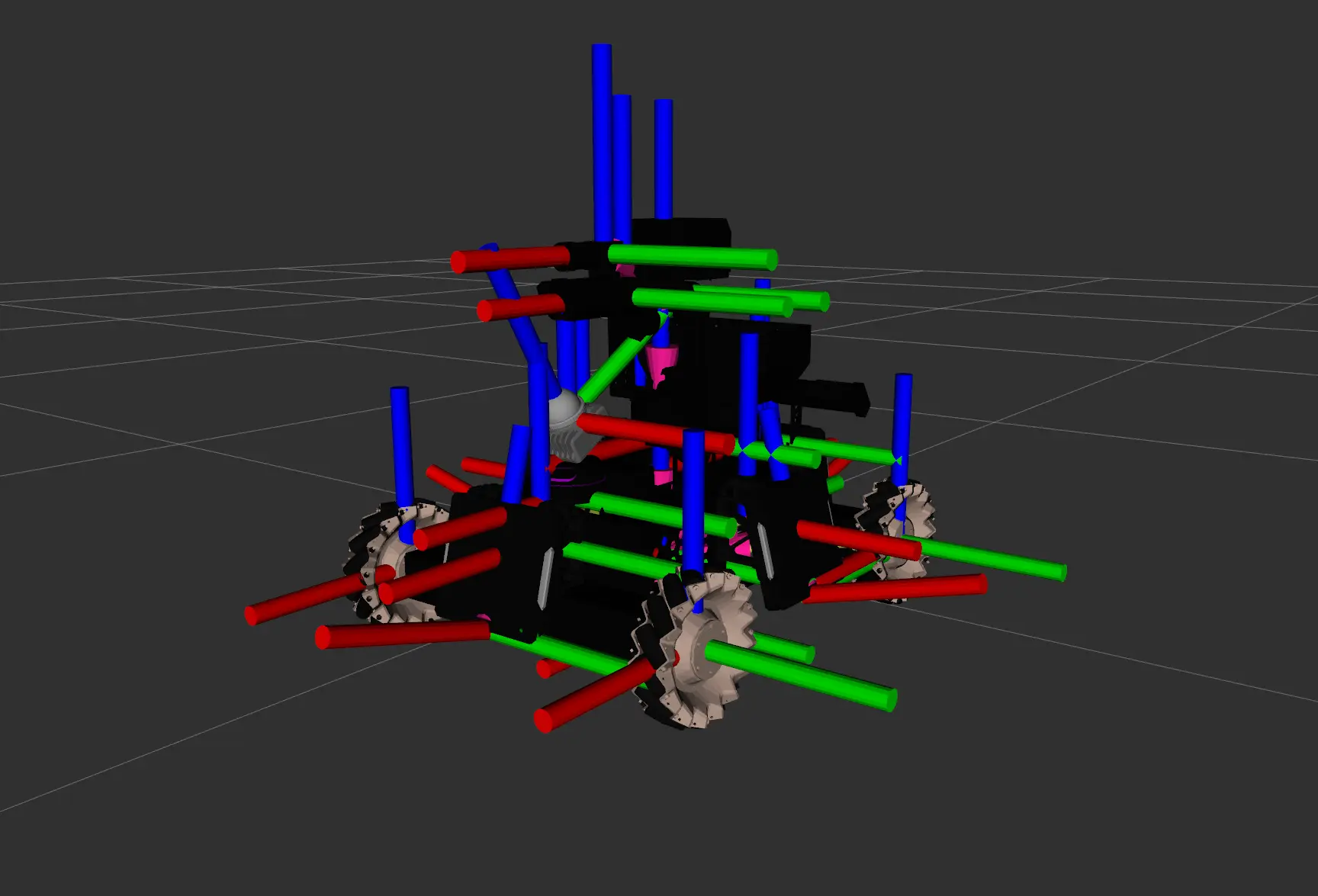
当前机器人描述文件基于 rmua19_standard_robot 进行二次编辑,加入了工业相机和激光雷达等传感器。
-
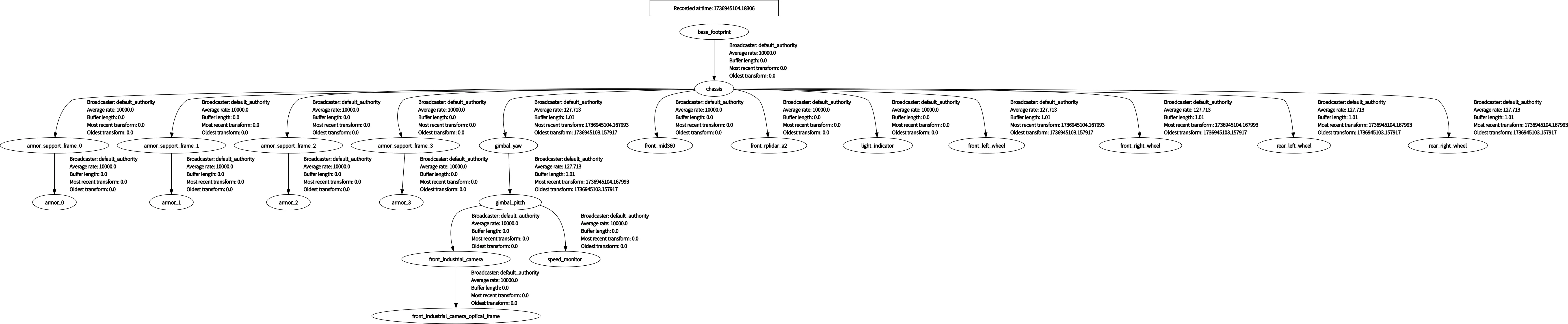
搭载云台相机 industrial_camera 和激光雷达 rplidar_a2 和 Livox mid360,其中相机与 gimbal_pitch 轴固连,mid360 倾斜侧放与 chassis 固连。
- Ubuntu 22.04
- ROS: Humble
sudo apt install git-lfs
pip install vcstool2mkdir -p ~/ros_ws
cd ~/ros_wsgit clone https://github.com/SMBU-PolarBear-Robotics-Team/pb2025_robot_description.gitvcs import --recursive < dependencies.repospip install xmacrorosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -ycolcon build --symlink-installros2 launch pb2025_robot_description robot_description_launch.py通过 Python API,在 launch file 中解析 XMacro 文件,生成 URDF 和 SDF 文件 (Recommend):
感谢前辈的开源工具 xmacro 和 sdformat_tools ,这里简述 XMacro 转 URDF 和 SDF 的示例,用于在 launch file 中生成 URDF 和 SDF 文件。
from xmacro.xmacro4sdf import XMLMacro4sdf
from sdformat_tools.urdf_generator import UrdfGenerator
xmacro = XMLMacro4sdf()
xmacro.set_xml_file(robot_xmacro_path)
# Generate SDF from xmacro
xmacro.generate()
robot_xml = xmacro.to_string()
# Generate URDF from SDF
urdf_generator = UrdfGenerator()
urdf_generator.parse_from_sdf_string(robot_xml)
robot_urdf_xml = urdf_generator.to_string()通过命令行直接转换输出 SDF 文件(Not Recommend):
source install/setup.bash
xmacro4sdf src/pb2025_robot_description/resource/xmacro/pb2025_sentry_robot.sdf.xmacro > src/pb2025_robot_description/resource/xmacro/pb2025_sentry_robot.sdfNone.
-
robot_description (std_msgs/msg/String)机器人描述文件(字符串形式)。
-
joint_states (sensor_msgs/msg/JointState)如果命令行中未给出 URDF,则此节点将侦听
robot_description话题以获取要发布的 URDF。一旦收到一次,该节点将开始将关节状态发布到joint_states话题。 -
any_topic (sensor_msgs/msg/JointState)如果
sources_list参数不为空(请参阅下面的参数),则将订阅此参数中的每个命名话题以进行联合状态更新。不要将默认的joint_states话题添加到此列表中,因为它最终会陷入无限循环。 -
tf, tf_static (tf2_msgs/msg/TFMessage)机器人关节坐标系信息。
-
use_sim_time (bool, default: False)是否使用仿真时间。
-
robot_name (str, default: "pb2025_sentry_robot")机器人 XMacro 描述文件的名字(无需后缀)。描述文件应位于
package://pb2025_robot_description/resource/xmacro目录下。 -
robot_xmacro_file (str, default: "package://pb2025_robot_description/resource/xmacro/pb2025_sentry_robot.sdf.xmacro")机器人 XMacro 描述文件的绝对路径。本参数的优先级高于
robot_name,即若设置了robot_xmacro_file,则robot_name参数无效。若未设置robot_xmacro_file,则使用robot_name参数并自动补全路径作为robot_xmacro_file的值。 -
source_list (array of strings, default: "['serial/gimbal_joint_state']")该数组中的每个字符串代表一个话题名称。对于每个字符串,创建对
sensor_msgs/msg/JointStates类型的命名话题的订阅。发布到该话题将更新joint_states中指定的关节状态。 -
offset_timestamp(double, default: 0.0)用于调整 JointState 时间戳的偏移量,对于串口通信的云台位姿等数据,可能存在极小的延迟影响自动瞄准系统的性能,通过此参数可以调整时间戳。
Related PR: Add offset-timestamp param #109 -
rviz_config_file (str, default: "package://pb2025_robot_description/rviz/visualize_robot.rviz")RViz 配置文件路径。
-
use_rviz (bool, default: True)是否启动 RViz 可视化界面。
-
use_respawn (bool, default: False)是否在节点退出时尝试重启节点。
-
log_level (str, default: "info")日志级别。