![]()
![]()
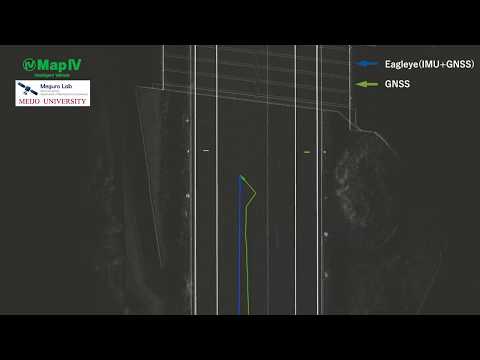
Eagleye is an open-source software for vehicle localization utilizing GNSS and IMU[1]. Eagleye provides highly accurate and stable vehicle position and orientation by using GNSS Doppler[2][3][4][5][6]. The flowchart of the algorithm is shown in the figure below. The algorithms in this software are based on the outcome of the research undertaken by Machinery Information Systems Lab (Meguro Lab) in Meijo University.

GNSS receiver
GNSS Antenna
IMU
Wheel speed sensor
- Eagleye uses vehicle speed acquired from CAN bus.
Clone and Build MapIV's fork of RTKLIB. You can find more details about RTKLIB here.
sudo apt-get install gfortran
cd $HOME
git clone -b rtklib_ros_bridge_b34 https://github.com/MapIV/RTKLIB.git
cd $HOME/RTKLIB/lib/iers/gcc/
make
cd $HOME/RTKLIB/app/consapp
make
Clone and build the necessary packages for Eagleye.
cd $HOME/catkin_ws/src
git clone --recursive https://github.com/MapIV/eagleye.git
git clone https://github.com/MapIV/rtklib_ros_bridge.git
git clone https://github.com/MapIV/nmea_comms.git
git clone https://github.com/MapIV/nmea_ros_bridge.git
git clone https://github.com/MapIV/gnss_compass_ros.git
git clone https://github.com/MapIV/llh_converter.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
- IMU settings.
- Output rate 50Hz
-
Check the rotation direction of z axis of IMU being used. If you look from the top of the vehicle, if the left turn is positive, set
pitchto3.14159ineagleye/eagleye_util/tf/config/sensors_tf.yaml.pitch: 3.14159
- Check if wheel speed (vehicle speed) is published in
/can_twisttopic.
- Topic name: /can_twist
- Message type: geometry_msgs/TwistStamped twist.liner.x
-
Check if the IMU data is published in
/imu/data_rawtopic. -
Start RTKLIB.
ex. single point positioning
cd $HOME/RTKLIB bash rtklib_ros_bridge_single.shex. Real Time Kinematic
cd $HOME/RTKLIB bash rtklib_ros_bridge_meijo_rtk.sh -
Check if RTKLIB is working by execute the following command in the terminal. If the RTKLIB is working correctly, positioning information is appeared continuously in the terminal.
status 0.1 -
Start rtklib_ros_bridge.
roslaunch rtklib_bridge rtklib_bridge.launch -
Start nmea_comms in f9p or nmea_ros_bridge in mosaic.
roslaunch nmea_comms f9p_nmea_sentence.launchor
roslaunch nmea_ros_bridge nmea_udp.launch
- eagleye_rt : real-time version
- eagleye_pp : post-processing version
While normal eagleye requires CAN (wheel speed) information, this option allows localization estimation with GNSS/IMU alone, without vehicle speed.
However, in this mode, note the following
- Accuracy degrades in non-open sky environments.
- RTK positioning is required.
- Localization estimating is not possible when driving backward.
To use this mode
- Use launch/eagleye_rt_canless.launch for eagleye_rt instead of launch/eagleye_rt.launch.
- Set use_canless_mode in eagleye_pp_config.yaml to true for eagleye_pp.
This option allows for more immediate heading estimatiion, and allows GNSS to estimate heading even at low speeds. eagleye_pp not yet supported.
To use this mode
- Use launch/eagleye_rt_dualantenna.launch for eagleye_rt instead of launch/eagleye_rt.launch.
| No. | Date | Place | Sensors | Link |
|---|---|---|---|---|
| 1 | 2020/01/27 | Moriyama, Nagoya route |
GNSS: Ublox F9P IMU: Tamagawa AU7684 LiDAR: Velodyne HDL-32E |
Download |
| 2 | 2020/07/15 | Moriyama, Nagoya route |
GNSS: Ublox F9P with RTK IMU: Tamagawa AU7684 LiDAR: Velodyne VLP-32C |
Download |
The 3D maps (point cloud and vector data) of the route is also available from Autoware sample data.
-
A. Takanose, et., al., "Eagleye: A Lane-Level Localization Using Low-Cost GNSS/IMU", Intelligent Vehicles (IV) workshop, 2021 Link
-
J Meguro, T Arakawa, S Mizutani, A Takanose, "Low-cost Lane-level Positioning in Urban Area Using Optimized Long Time Series GNSS and IMU Data", International Conference on Intelligent Transportation Systems(ITSC), 2018 Link
-
Takeyama Kojiro, Kojima Yoshiko, Meguro Jun-ichi, Iwase Tatsuya, Teramoto Eiji, "Trajectory Estimation Based on Tightly Coupled Integration of GPS Doppler and INS" -Improvement of Trajectory Estimation in Urban Area-, Transactions of Society of Automotive Engineers of Japan 44(1) 199-204, 2013 Link
-
Junichi Meguro, Yoshiko Kojima, Noriyoshi Suzuki, Teramoto Eiji, "Positioning Technique Based on Vehicle Trajectory Using GPS Raw Data and Low-cost IMU", International Journal of Automotive Engineering 3(2) 75-80, 2012 Link
-
K Takeyama, Y Kojima, E Teramoto, "Trajectory estimation improvement based on time-series constraint of GPS Doppler and INS in urban areas", IEEE/ION Position, Location and Navigation Symposium(PLANS), 2012 Link
-
Junichi Meguro, Yoshiko Kojima, Noriyoshi Suzuki, Eiji Teramoto, "Automotive Positioning Based on Bundle Adjustment of GPS Raw Data and Vehicle Trajectory", International Technical Meeting of the Satellite Division of the Institute of Navigation (ION), 2011 Link
-
Yoshiko Kojima, et., al., "Precise Localization using Tightly Coupled Integration based on Trajectory estimated from GPS Doppler", International Symposium on Advanced Vehicle Control(AVEC), 2010 Link
Eagleye is provided under the BSD 3-Clause License.
If you have further question, email to [email protected].