Myo Placement

The Myo should be placed above the muscle you wish to measure, this is usually on the forearm as most muscles controlling the fingers are exterior to the hand and inside the forearm. Intrinsic muscles inside the hand do account for some motion of the hand and therefore reading forearm muscles alone will not allow for full reconstruction of all possible hand movements. The muscles of the forearms are layered, meaning some muscles readings will be attenuated by other muscles closer to the sEMG sensor.
Tl;dr - Myo placement really matters, you should be able to justify where you put the Myo for experiments and why.
It's important to maintain good contact with the skin, if the Myo seems too loose and moves around you can use the 8 included sizing clips to tighten it. These clips can also be 3D printed using the STL here.
There are over 30 muscles in the hand [1], many movements of the hand use muscles in the forearm connected to thin tendons. Muscles responsible for finger movement lie further away from the forearm surface skin than the muscles responsible for hand movement [2, p. 763]. This causes sEMG signals responsible for finger movement to have a lower amplitude and larger amount of noise than those responsible for arm movement, due to attenuation and filtering from forearm signals. Several electrodes are therefore required to disambiguate finger movement [3]. Some humans even have more muscles than others, for example, the palmaris longus which flexes the wrist joint is absent in about 15% of the population [2, p. 767], increasing cross subject variation of sEMG data.
The above image shows that placing the Myo in different positions down the forearm will change what muscles the sensors sit on top of.
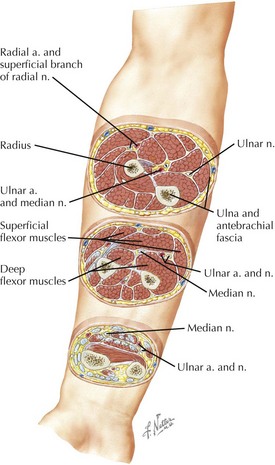
Many papers complain about the accuracy of their models in predicting the angles of the thumb but never give a hypothesis on why, these same papers often do not justify the positioning of the Myo. The best paper I have found in this regard is by Pallotti et al. which included this figure of the mid forearm [4], not the proximal forearm which is most commonly used:

[Cross section of the right middle forearm (palm supination): Source]
Not all muscles are in the forearm
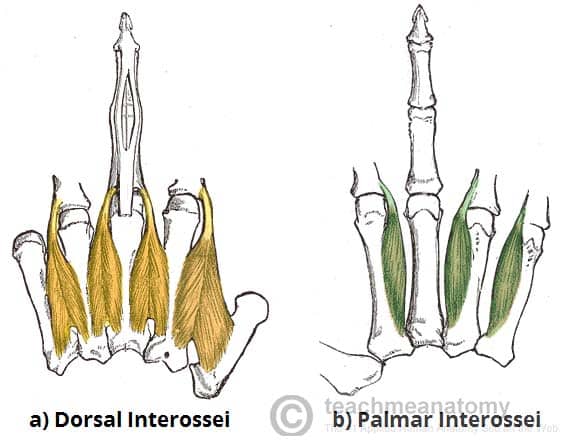)
[Interosseous Muscles of the hand: Source]
The muscle that abducts (spreads) the index, middle and ring fingers are the dorsal interossei. Adduction (opposite of abduction, pulling together) is achieved by the palmar interossei. Both of these muscles are intrinsic (located in the hand), therefore would likely be undetected by placing the Myo in the forearm.
The Opponens Pollicis Muscle opposes the first carpometacarpal joint of the thumb. It is an intrinsic muscle to the hand, making it hard to measure with the Myo.
Thumb Muscles:
Extensor Pollicis Longus - Extends the Thumb
Abductor Pollicis Longus and Abductor Pollicis Brevis - Abduction, many papers put the Myo too high to measure this muscle then complain about thumb prediction accuracy, so placement matters.
Finger Muscles:
Extensor Digitorum - Extends fingers
Extensor Digiti Minimi - Extends the little finger
Extensor Indicis Proprius - Extends the index finger
Sources:
[1] - How do hands work? Institute for Quality and Efficiency in Health Care (IQWiG), 2018.
[2] - R. L. Drake, W. Vogl, and A. W. M. Mitchell, Gray’s Anatomy for Students. Elsevier, 2019.
[3] - A. H. Al-Timemy, G. Bugmann, J. Escudero, and N. Outram, “Classification of finger movements for the dexterous hand prosthesis control with surface electromyography,” IEEE J Biomed Health Inform, vol. 17, no. 3, pp. 608–618, May 2013. Research Gate Link
[4] A. Pallotti, G. Orengo, and G. Saggio, “Measurements comparison of finger joint angles in hand postures between an sEMG armband and a sensory glove,” Biocybernetics and Biomedical Engineering, vol. 41, no. 2, pp. 605–616, Apr. 2021.