原始Markdown文档、Visio流程图、XMind思维导图:https://github.com/LiZhengXiao99/Navigation-Learning
[TOC]
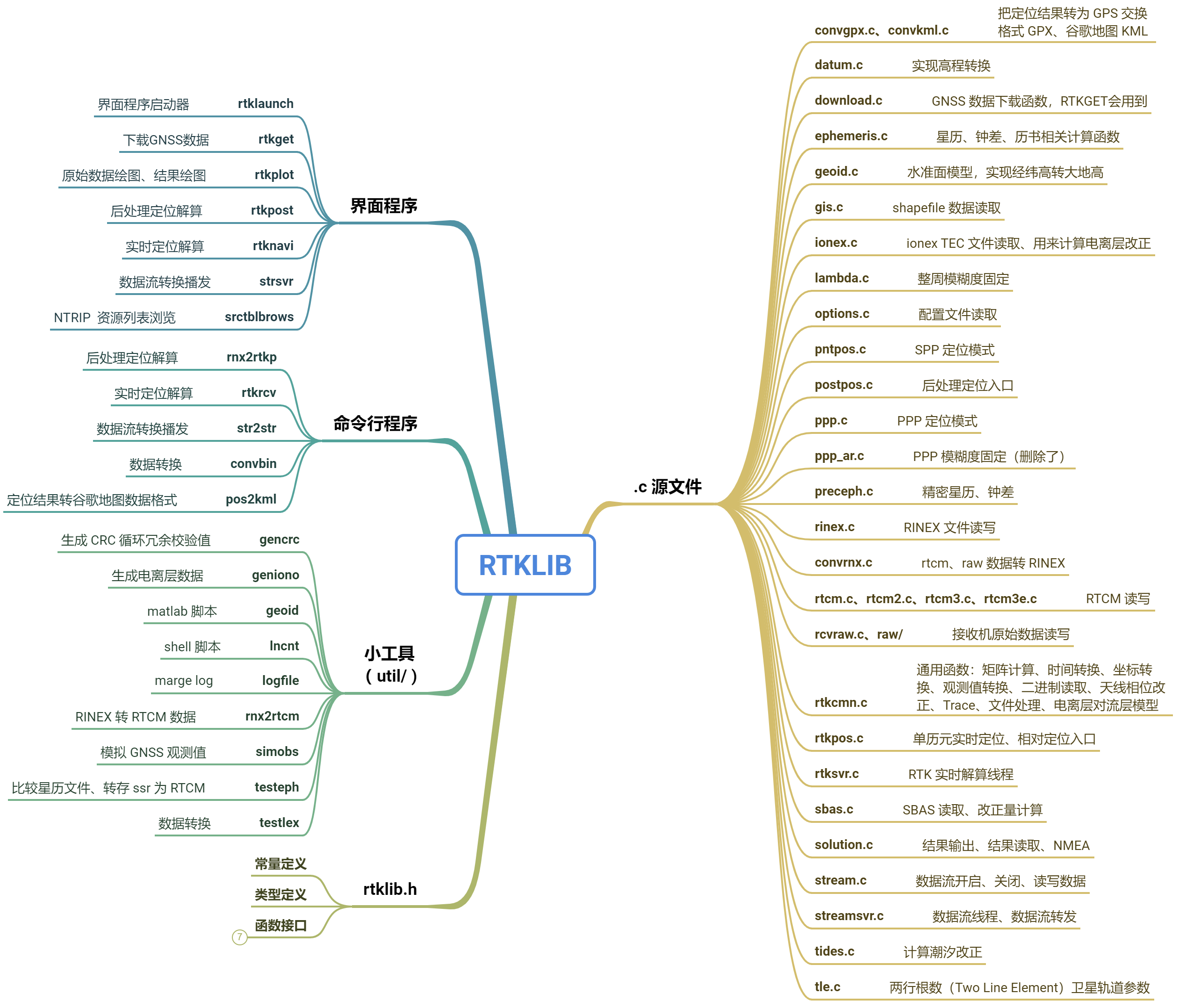
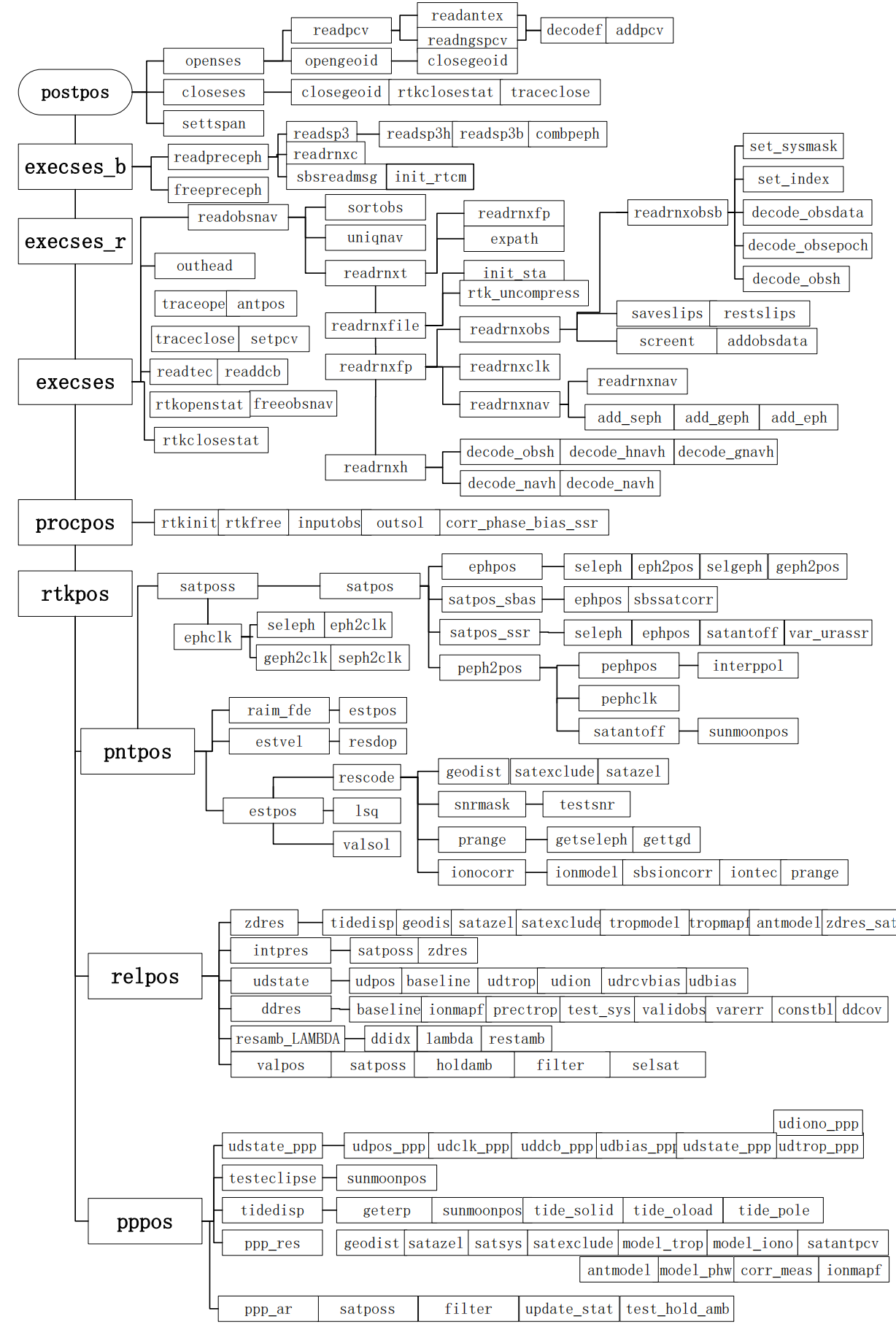
RTKLIB 是知名的全球导航卫星系统 GNSS 开源定位解算程序包,日本东京海洋大学的高须知二(Tomoji Takasu)开发,由一个核心程序库和多个命令行程序、界面程序组成;代码规范、功能完善、可拓展性好。RTKLIB 功能很齐全,GNSS 数据处理所需的基本功能都有,支持的数据格式很多,既可以实时解算也可以后处理,既可以接自己的 GNSS 模块也可以连 IGS 的数据流,既可以解算自己采集的数据也可以算 IGS 测站的数据,既可以 RTK 也可以 PPP;许多 GNSS 导航定位程序开源程序都是基于 RTKLIB 二次开发衍生而来,适合作为 GNSS 入门学习的项目。它的项目结构如下所示:
RTKLIB 可以初步实现以下功能,相对于商业软件,可靠性没那么高,精度没那么高,但对于部分科研已经能够满足:
- 静态短基线解算:相对定位,比如把一个测站安装在比较稳定的地区,把另一个测站安装在比较容易形变的地区做变形监测。
- 动态后处理差分 PPK:比如无人机遥感、倾斜摄影测量等,需要高精度的位置和姿态解算精度。
- 实时动态差分 RTK:导航定位。
- 精密单点定位 PPP:可以用来算基准站坐标,地震监测、精密定轨、电离层对流层建模、时间传递。
- 实时精密单点定位 RT-PPP: 比如接收实时的精密卫星的改正数,靠本地接收机的数据进行实时单点定位。用途比较广泛在海洋上,海啸的监测预警、海平面变化的监测、船只定位、海上石油平台作业等。
RTKLIB 界面程序包括以下这些,可以直接使用编译好的程序,也可以用作者提供的 Qt 和 C++ builder 两套界面程序的源码自己编译。

- rtklaunch:界面程序启动器,界面如上,用来启动另外的界面程序
- rtkget:下载 GNSS 数据,包括 OBS、EPH、ATX、CLK、DCB 等多种文件,可同时下载起止时间内多个机构、多个测站的数据,但可能下载速度很慢。
- rtkcov:GNSS 数据转换,把采集的接收机原始数据转成 RINEX。
- rtkplot:原始数据绘图、结果绘图,可以用来做原始数据质量分析、结果精度分析、结果轨迹绘图。
- rtkpost:后处理定位解算,传入观测文件、星历文件和其它改正信息文件,设置好解算选项进行后处理解算。
- rtknavi:实时定位解算,接通导航数据流,实时定位解算绘图。
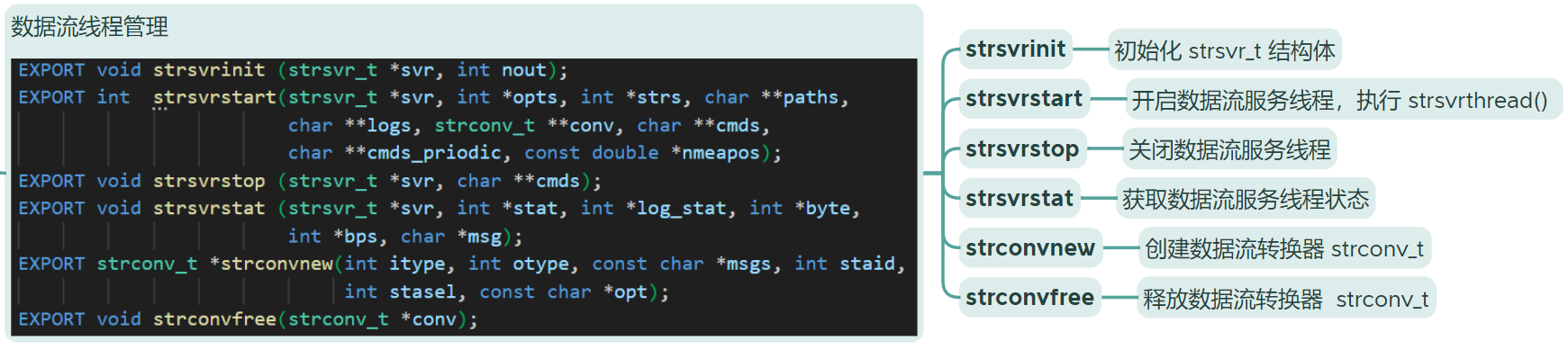
- strsvr:数据流转换播发。
- srctblbrows:NTRIP 资源列表浏览器。
命令行程序的功能和界面程序功能基本对应。界面程序好用,命令行程序代码好读;可以通过界面程序学软件的用法,理解程序运行逻辑;然后再通过阅读命令行程序的源码,来更深入的理解。当然,命令行程序还有一大作用就是写用来脚本进行批处理。
- rnx2rtkp:后处理定位解算,功能类似 rtkpos。
- rtkrcv:实时定位解算,功能类似 rtknavi。
- str2str:数据流转换播发,功能类似 strsvr。
- convbin:数据转换,功能类似 rtkcov。
- pos2kml:定位结果转谷歌地图数据格式。
如果有 GNSS 模块和天线,通过串口或网口连接电脑、树莓派,可以用 RTKLIB 程序包实现以下操作:
- 你可以用 RTKNAVI 或 RTKRCV 进行实时定位解算,单 GNSS 一般只能进行 SPP 解算,米级精度;想提高精度:可以接入差分数据做 RTK(自己搭基准站或者买 CORS 账号);或者提前下载一些精密改正文件,并申请 IGS 账号,接入 SSR 改正数据,做实时 PPP。在进行实时解算的过程中,可以通过 LOG 把数据流的数据都都存下来。
- 你可以通过 STRSVR 或 STR2STR 把数据存到文件里;或者通过 Ntrip、TCP 等协议把数据播发出去,进行远程解算;或者作为 Ntrip 数据源把数据挂载 NtripCaster 搭基准站。
- 如果你只有观测数据(伪距载波多普勒)需要自己下载星历文件,或者你要做 PPP 需要下载改正文件;可以用 RTKGET 或者通过对应的网址手动下载(比如去武大 IGS 中心:ftp://igs.gnsswhu.cn/pub/gps/)。
- 想要更高的精度,或者实时解算的效果不好,你可以把数据采集下来进行后处理分析。
- 后处理一般都用 RINEX 文件,而接收机采集下到的数据大多是 RTCM 或各种接收机的原始数据,这些数据大多都是二进制的(相比文本文件,二进制文件小,程序读读写快,但是不方便看里面存的内容),可以通过 CONVBIN 或 RTKCONV 将数据转为 RINEX。
- 解算前先用 RTKPLOT 作图分析原始数据质量,看卫星数、观测值连续性,画天空图看卫星几何分布,画信噪比图看信号质量等。最新的 b34 版本直接下载的 RTKPLOT 好像有 bug,可以自己编译或者下个别的版本的,比如这个。
- 使用 RTKPOST 或 RNX2RTKP 都可以进行后处理解算:
- 界面程序 RTKPOST 可以很方便的设置解算选项,还能导出设置的处理选项文件,适合处理单个数据。
- 命令行程序 RNX2RTKP 需要输一串命令行参数,想改处理选项得用配置文件(可以用 RTKPOST 进行设置,导出配置文件),处理单个数据时略显麻烦,它的优势是可以写脚本进行批处理。
- 也可以参照着 RNX2RTKP 自己写后处理主文件。
- 算完之后可以输出三种文件:结果文件、解算中间结果文件、Trace 文件;通过 RTKPLOT 可以对结果文件、解算中间结果文件绘图,进行可视化分析,Trace 文件只能手动打开看。
- 结果文件(solution):定位定速结果,可以输出 NMEA 格式也可以输出 RTKLIB 自定义的格式。
- 解算中间结果文件(solution status):解算的中间结果,包括每颗卫星的残差、高度角方位角、模糊度、对流层延迟、电离层延迟、钟差等;
- 调试文件(Trace):看 Trace 文件可以辅助断点调试,甚至替代断点调试。程序执行出错,开 2/3 级 Trace,看 Trace 文件里的 error、warring 就能,知道大致出了啥问题,定位出问题的函数,断点调试的时候你就知道该在哪设置断点了。Trace 信息分五个等级,从 1-5 重要性逐渐降低,通过 tracelevel() 函数可以设置输出的最高等级,设置 2 级意味着只输出 1/2 级信息。
- 一级 Trace 是致命错误,出现一级错误基本上意味着程序无法继续执行,比如观测星历文件读取错误、内存分配错误。
- 二级 Trace 是警告,出现二级警告程序可能依然能继续执行,但也可能无法进行解算,比如改正文件读取失败,数据解析出错,二进制数据校验出错,某一历元解算失败,缺失解算所需的星历或改正参数、观测值剔除等。
- 三级 Trace 是程序主要执行流程,主要在函数的开头,告诉我们执行到了这个函数。
- 四级 Trace 是比三级更深入的程序执行流程,主要在三级 Trace 函数的中间或者调用的子函数开头,告诉我们执行到了这个操作。
- 五级 Trace 是解算的中间过程,具体到每颗卫星,每个频点,每次循环。
- 如果解算出不了结果,可以把 Trace 调试等级设成 2 看看有哪些错误或警告。如果是打开什么文件失败了,说明文件路径没设置好;如果是文件解析出错,可能也是文件类型选错或文件有问题;如果总是报残差过大解算失败,那是解算选项设置的不对。
- 如果解算结果达不到要求,可以输出解算中间结果 (solution status 文件),通过 RTKPLOT 作图分析,看看能不能改进,比如有的卫星残差总是大,可以将其排除再解算。
- 看 Trace 文件和解算中间结果文件还解决不了问题,那就只能断点调试了。
- 后处理比实时处理的有以下优势:
- 实时处理必须要同时有观测数据(伪距载波多普勒)和星历数据流;而后处理只要有观测数据就行了,星历文件可以去 IGS 网站下载。
- 后处理可以尝试不同的解算参数,可以对解算中间结果分析,根据解算情况调整参数、排除卫星。
- 后处理可以对数据文件质量进行分析。
- 后处理可以用正反向滤波平滑计算。
- 后处理可以断点调试。
-
支持七大 GNSS 系统,包括 GPS,GLONASS,Beidou,Galileo,QZSS、IRNSS 和 SBAS。
但是不支持全频点,多频算法不完善,对北斗的支持不好。
-
支持 9 种 GNSS 实时和后处理定位模式:
- single:伪距单点定位;
- DGPS/DGNSS:伪距差分;
- kinematic:载波动态相对定位,动态RTK,假设流动站是移动的,可以做车载定位;
- Static:载波静态相对定位,静态RTK,两站都是静止的,可以得到很高的精度;
- Moving-Baseline:双天线,两站都动,主要用来定姿;
- Fixed:固定坐标,解算模糊度、对流层、电离层等参数;
- PPP-Kinematic:动态精密单点定位;
- PPP-Static:静态精密单点定位;
- PPP-Fixed:PPP 固定坐标,解算模糊度、对流层、电离层等参数。
-
支持多种 GNSS 标准格式和协议:RINEX2.10、RINEX2.11、RINEX2.12、RINEX3.00、RINEX3.01、RINEX3.02、RTCM2.3、RTCM3.1、RTCM3.2、BINEX、NTRIP、NMEA0183、SP3、ANTEX1.4、IONEX1.0、NGS PCV、EMS 2.0。
-
支持多种 GNSS 接收机专有数据协议格式:NovAtel:OEM4/5/6/7,OEM3, OEMStar、Superstar II、 Hemisphere、Crescent、u‐blox:LEA-4T/5T/6T、SkyTraq、JAVAD 、GW10-II/III 和 NVS。
我手头 GNSS 接收机的原始数据都可以用 RTKLIB 简单解析(频点支持不全),部分国产接收机虽然没列举在上面,但用的也是上面这些数据格式,我用过的几款国产接收机(华测、和芯星通、北云科技)直接输出的原始数据都是诺瓦泰OEM格式,用 RTKLIB 可以解析,但频点不全。
-
支持外部通信:Serial、TCP/IP、NTRIP、本地日志文件、FTP 和 HTTP。
接收机一般通过串口或网口可以直接连电脑传输观测数据和星历数据;差分定位用的基准站数据和实时PPP用的SSR数据一般通过NTRIP接入;实时定位的时候可以保存原始数据流到日志文件,可以通过日志文件来模拟实时数据流解算来进行调试,也可以转为 RINEX 后处理。
-
提供许多代码库和API:卫星和导航系统函数、矩阵和向量函数,时间和字符串函数、坐标的转换,输入和输出函数、调试跟踪函数、平台依赖函数、定位模型、大气模型、天线模型、地球潮汐模型、大地水准面模型、基准转换、RINEX函数、星历和时钟函数、精密星历和时钟、接收机原始数据函数、RTCM函数,解算函数、谷歌地球KML转换、SBAS函数、选项(option)函数、流数据输入和输出函数、整周模糊度解算、标准定位、精密定位、后处理定位(解算)、流服务器函数、RTK服务器函数、下载函数。
在本文的最后会详细介绍这些 API。
基于的 BDS2-Clause 开源协议,用户能够自由地使用,修改源代码,将修改后的代码选择继续开源或者闭源都可,须遵守如下两项要求:
-
如果分发的软件包含源代码,需在源代码中保留原始的 BSD 许可证声明;
-
如果分发的软件仅包含二进制程序,需在文档或版权说明中保留原始的 BSD 许可证声明。
各种各样的都有,有对定位解算算法做增强的、有做组合导航的、有做服务端程序的、有做软件接收机的、做应用的。下面介绍几个我了解的:
- RTKLIB-demo5:针对低成本接收机做了算法增强。
- rtklib-py:
- GAMP:山科大周锋写的双频浮点解 PPP,在 RTKLIB 基础上做精简和算法的增强,比原版 RTKLIB 简单,是入门学习 PPP 不错的选择。
- Ginan:澳大利亚,包括精密定位程序 PEA、定轨程序 POD,文档很详细,老师让我看,但我没看下去,代码比较难懂,
- GraphGNSSLib:港理工,支持图优化 SPP、RTK,作者在知乎很活跃,发过一些科普文章。
- GLIO:在 GraphGNSSLib 基础上做的 GNSS-IMU-Lidar 图优化紧组合;
- PPPLIB:我老师在矿大读研的时候写的,支持三频 SPP、PPK、PPP 和 IMU 组合。
- GINAV:MATLAB 紧组合,文件名起的和 RTKLIB 函数名一模一样,虽说是组合导航,但也可以只用其中的 GNSS 部分,相比 goGPS 简单不少。
- GICI-LIB:上海交大池澄博士开源的 GNSS-IMU-Camera 图优化多源融合程序,以 GNSS 为主,实现了 RTK、PPP 的模糊度固定
- PPP-AR:武大 GNSS 中心开源的后处理 PPP,使用配套的产品可以实现 PPP 模糊度固定,支持五频数据处理,使用了 rnx2rtkp 可执行程序计算测站初值坐标。
- IGNAV:武大 GNSS 中心
- pppwizard:
- GNSS-SDR:GNSS 软件接收机,与上面列举的数据处理软件不同,GNSS-SDR 实现基带算法直接对接收机输出的数字中频信号处理,PVT 部分用了 RTKLIB。
- PocketSDR:RTKLIB 作者新开源的软件接收机,包含一个射频前端和一套后处理 GNSS 接收机程序(只支持后处理),实现了一整套完整的 GNSS 接收机功能,采用 C、Python 编写,支持几乎所有的 GNSS 信号(比商业接收机支持的还要多),引入 RTKLIB 做库,用到了 RTKLIB 的一些结构体。
- APOLLO:百度的开源无人驾驶系统,用到了 RTKLIB 的 NMEA 结构体。
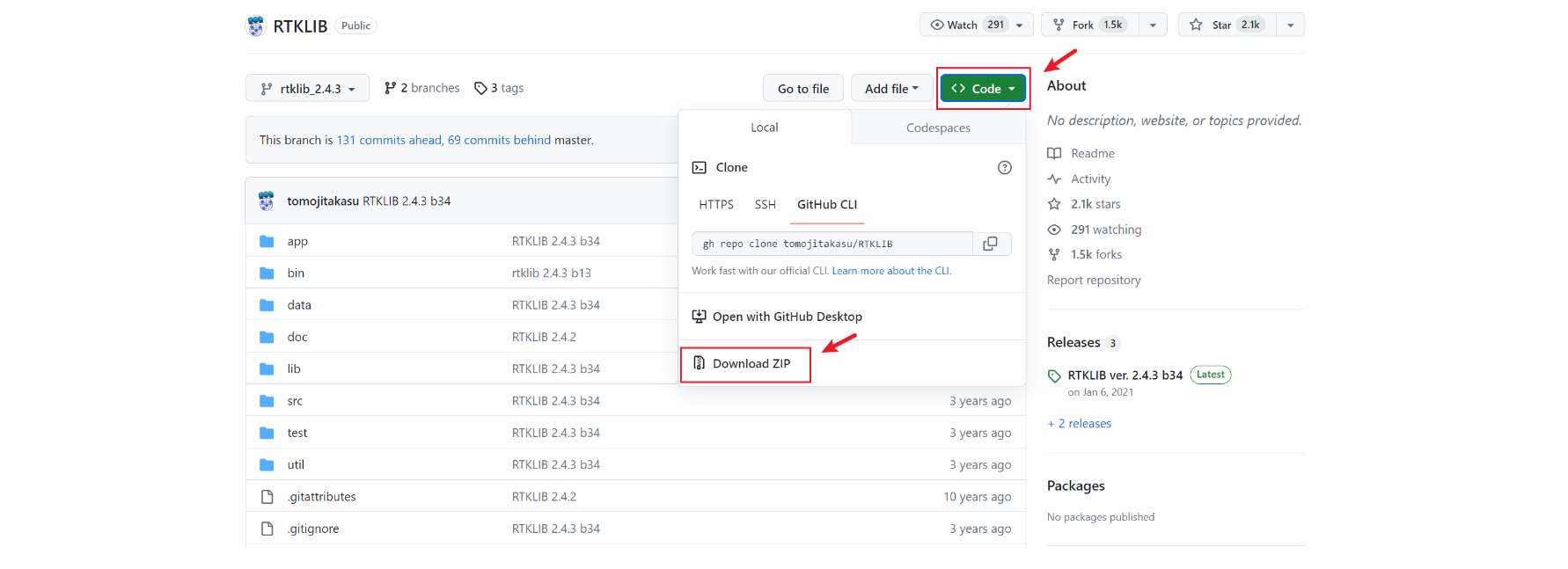
在RTKLIB官网选最新版 2.4.3 b34,点 Source Programs and Data 和 Binary APs for Windows 下面的GitHub进入GitHub页面:

点开绿色的 Code 下拉菜单,再点 Download ZIP:
解压两个压缩文件,得到的文件目录如下:
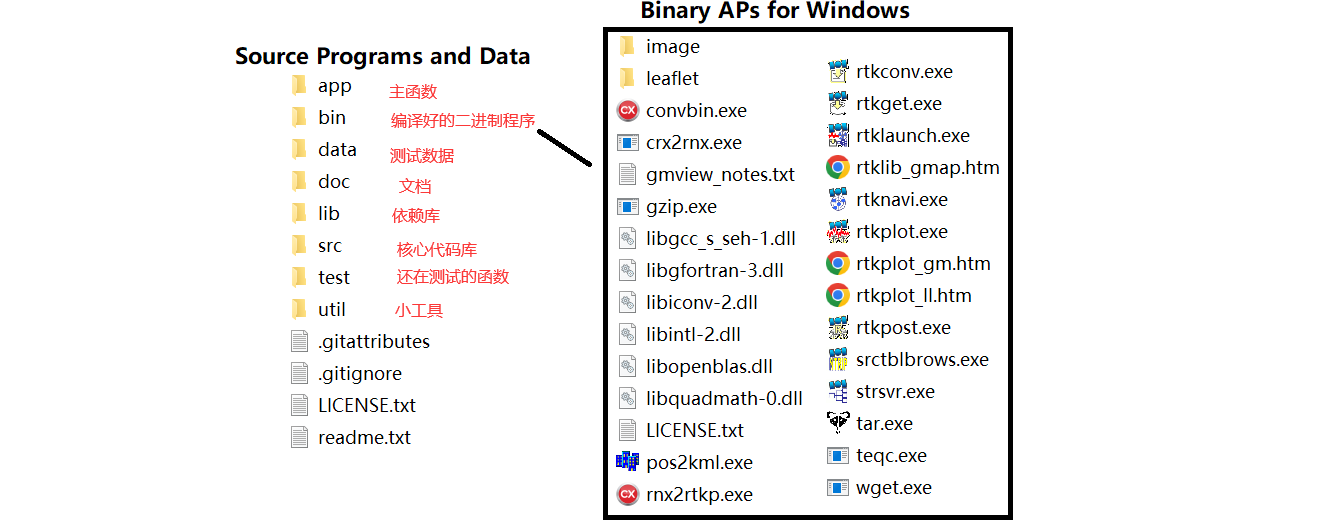
Source Programs and Data 是程序的源文件,Binary APs for Windows 是编译好的可执行文件,建议移到 Source Programs and Data 的 bin 目录下。rtkplot 用于原始数据和结果数据绘图,可以分析数据质量、解算精度,使用很频繁,建议放一个快捷方式在桌面,把数据文件、结果文件拖到图标上直接就画图。
- 看源码之前先会用软件
- 申请一个 IGS 账号
- 有 GNSS 接收机更好,没有也能学
- 做 RTK,
- 做 PPP,
- 采集数据后处理
- 有一点点 C 语言基础就可以了,之前上课学过那一点点 C 语言就足够了,不需要再特意的学语法,直接看代码,没见过的语法查一下,以后就会了;学编程光看书看网课是远远不够的,得多练,先看别人写的代码,然后才能自己写。
- 如果语法基础不好,一开始看的可能会比较艰难;可以先不想那么多,就从最基础的矩阵计算开始看,这几个小函数总能看下去吧;看完矩阵运算就继续看时间系统、坐标系统,RINEX文件读取......,一点点看,拼命的看,坚持下去;刚开始看的慢没关系,过了最初的坎,熟悉起来之后,后面就会慢慢顺起来,之后无论是再继续看别的程序还是自己写都能得心应手。
- 现在人工智能越来越强,把 RTKLIB 的代码段扔给 AI,基本都能给你解释解释。
- 网上 RTKLIB 的资料很丰富,基本上能把每一行代码的意思都给你讲明白了;可以先照着博客,把代码快速的过一遍,把博客上的注释、讲解复制到你手头的代码里,自己再看能顺很多。当然,博客大多写的很随意,不严谨,但有个参考总比没有好。
- 学 RTK 可以看硕士论文,学短基线算法、模糊度固定。论文写的不怎么样,但里面基础知识写的详细,很适合初学者阅读,相比比教材更有针对性(讲的基本都是 RTKLIB 用的到的算法),比博客更严谨(算法公式都是仔细检查过的)。
- 学 PPP 算法推荐看吉林大学周昌杰的硕士论文《基于 RTKLIB 的 GNSS 精密单点定位研究》。
- RTKLIB 算法除了模糊度固定,理解起来都没啥难度,只是有些算法你之前可能没听说过,找论文看看就会了。
- 代码量很大,直接看可能会一头雾水,很难一下记住那么复杂的代码逻辑;可以通过流程图、函数调用关系图、思维导图,来辅助理解;通过画图来理清思路,画出的图也可以用来复习。
- 推荐用 Markdown 记笔记,不用费心思调整排版,尤其是想记代码的时候,用 Word 很麻烦的。找视频或者文档花一两个小时学一下,就能上手;Markdown 软件有好多,我懒得折腾,用的 Typora,喜欢折腾想要功能丰富看可以看看 Obsidian、Notable,有共享协作需求可以用飞书。
- Markdown 里可以用 Latex 语法记公式,画一两个小时可以学个大概。Latex 公式的语法比较复杂,输公式很麻烦;短公式还可以直接输,长公式推荐用 Latex 公式编辑器,比如这个,如果想把别人的公式记到自己的笔记里,可以截图、拍照,用公式识别软件转 Latex。
- RTKLIB 的 manual 有 181 面,比较详细,先介绍附带工具包的使用,然后介绍核心代码库定义的 API,最后介绍算法模型。
- 工具包的使用可以找中文版的看,比如我的仓库里就有。
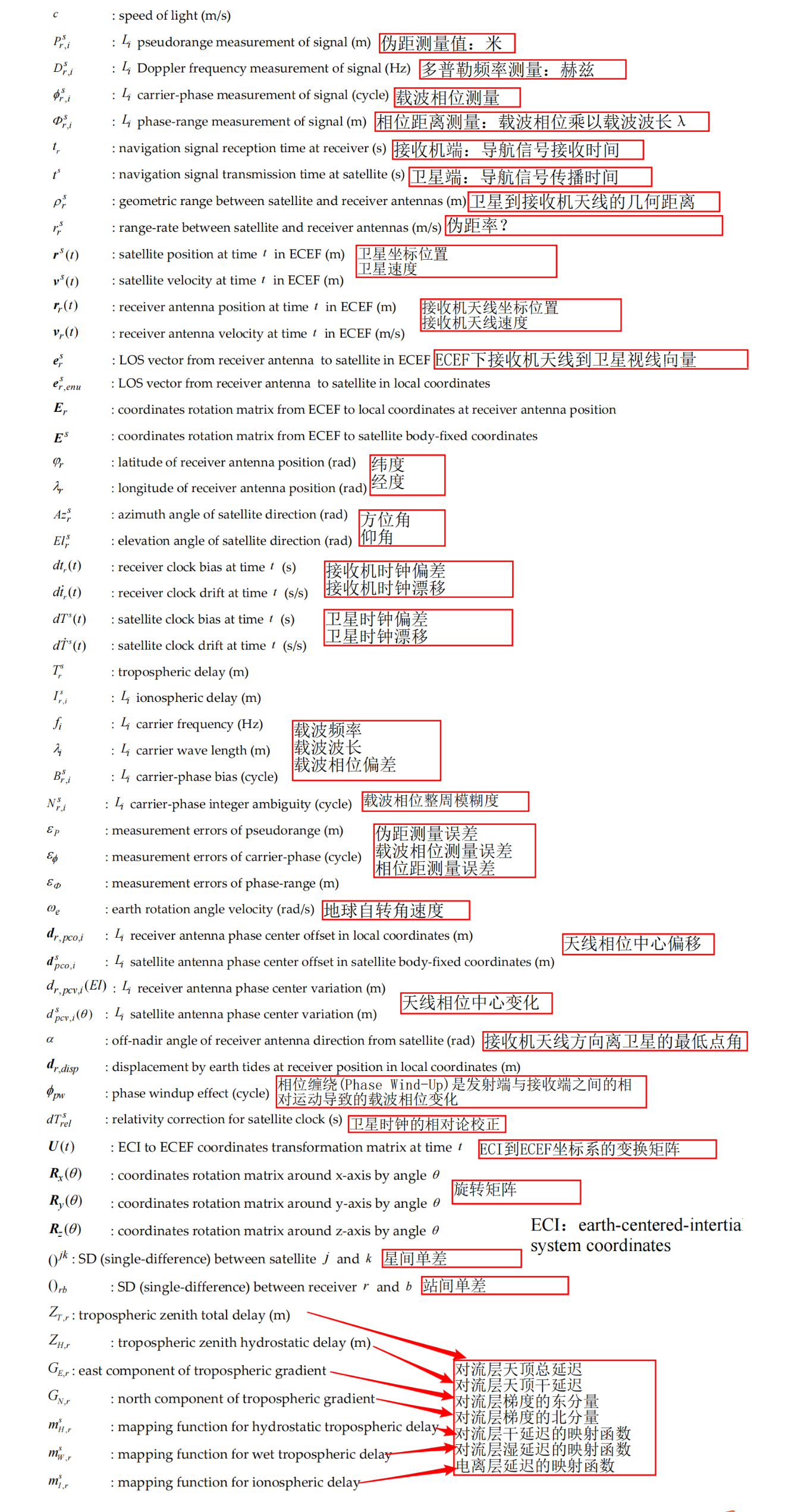
- 附录 E 介绍 RTKLIB 的模型和算法,要对着公式重点看;不要依赖翻译,直接看英文的,不认识的单词查一下,下次就会了。
- 常用的英文表述最好记下来,不止后面的模型和算法有,还会出现在代码的注释里,看英文论文也经常见。
- 命令行功能的程序和界面程序功能基本对应。界面程序好用,命令行程序代码好读。可以通过界面程序学软件的用法,理解程序运行逻辑;然后再通过阅读命令行程序的源码,来更深入的理解。
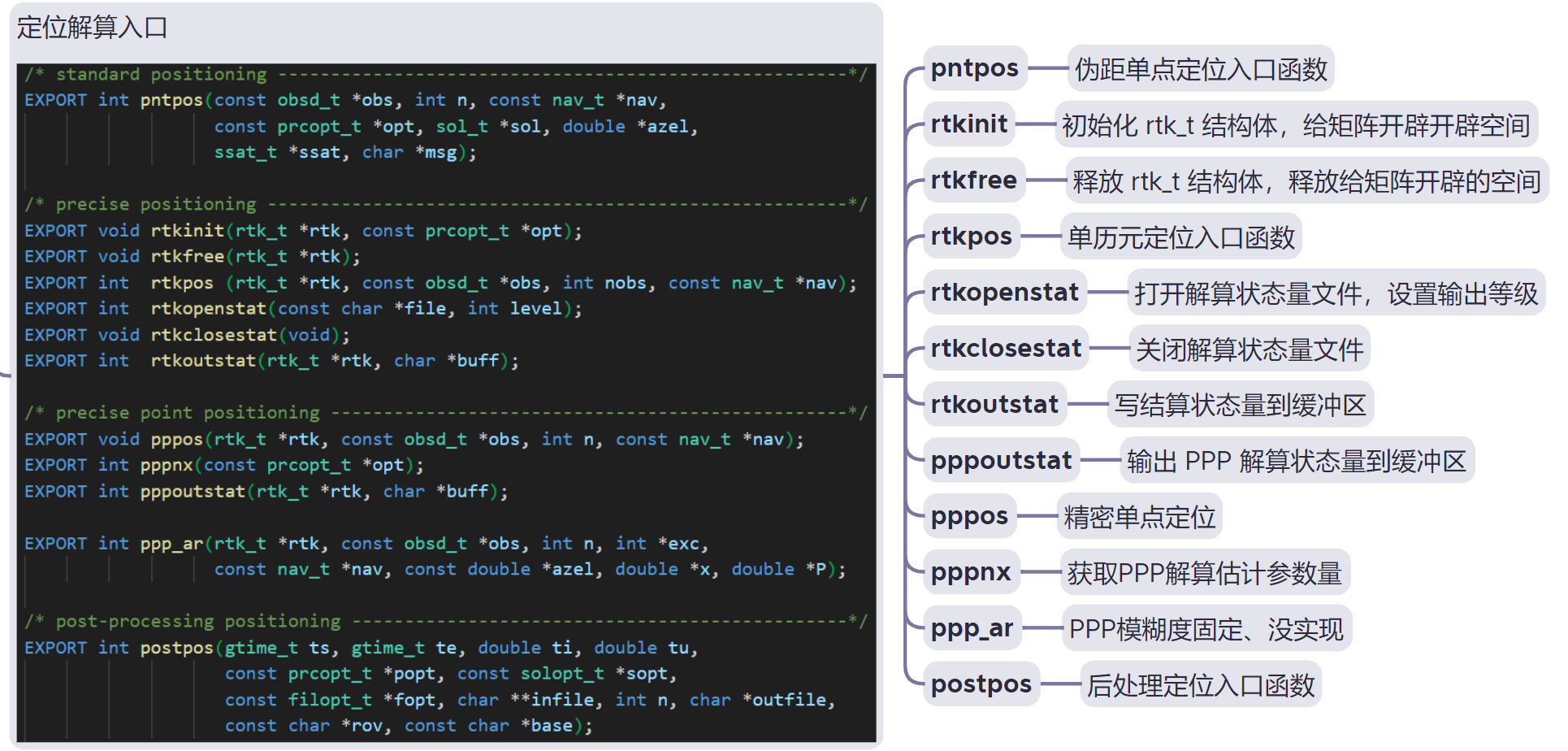
- 无论是实时解算还是后处理,都是从
rtkpos()函数开始进行单历元解算。后处理是;实时解算是 - 学的时候先从后处理开始,先看 postpos 的用法,然后顺着 rnx2rtkp 的源码,把从读取 RINEX 文件到算出定位结果整个过程看明白。
- 大部分内容,刚开始看的时候不用太关注内部具体实现,知道原理就好。知道数据存到什么类型里,在哪个函数计算,传入什么数据,计算得到什么数据,就行了。
-
矩阵运算:矩阵都是用一维 double 数组表示、列优先,要熟练掌握矩阵的加减乘除转置求逆,还要会
matprint()输出矩阵用于调试,比如你想看程序运行过程中某个矩阵的值,断点调试直接看肯定不行,矩阵都是指针,得用matprint()输出。 - 参数估计:把最小二乘、卡尔曼滤波的四个函数看明白;后处理的时候有前向滤波、反向滤波、正反向结合三种滤波方式,体现在代码上就是有个标记标志前后,取数据的顺序不同。
-
时间系统:知道基本概念(GPS 时、UTC、周内秒、跳秒、儒略日),理解
gtime_t类型,会用操作gtime_t的函数,比如算时间差、比较时间先后、输出时间字符串、输出当前北京时间字符串、转周内秒。 -
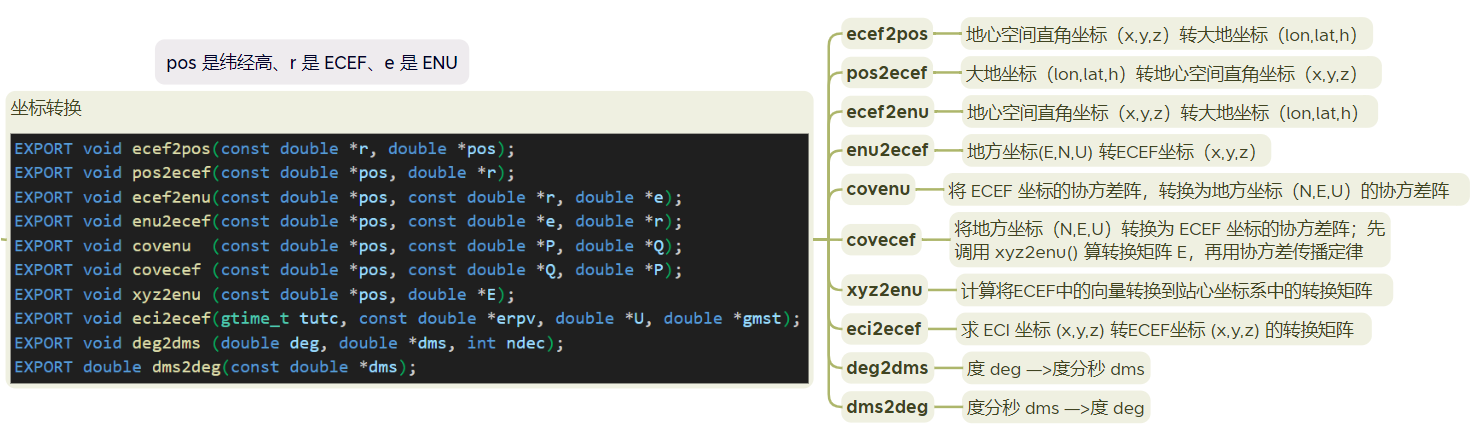
坐标系统:矩阵用三维向量表示,要了解 ECEF(XYZ)、LLH(纬经高)、ENU(东北天)的用途、转换函数(包括坐标转换、协方差转换)。
- ECEF 是直角坐标系,列观测方程计算方便,在 RTKLIB 中一般用 r 表示。
- LLH 反映了测站在地球椭球上的位置,在 RTKLIB 中一般用 pos 表示。
- ENU 是站心坐标系,是以测站为原点建立的直角坐标系,方便表示相对关系(卫星相对接收机、流动站相对于基准站),比如计算方位角高度角,视线向量;ENU 表示东北天,生活中常用,比如导航软件告诉你“向东行驶200米左转”;ENU 坐标系都是以某一个 LLH,这个原点 LLH 必须存下来,ENU 才有意义,ENU 转 ECEF、LLH 的时候需要有坐标原点的 LLH。
-
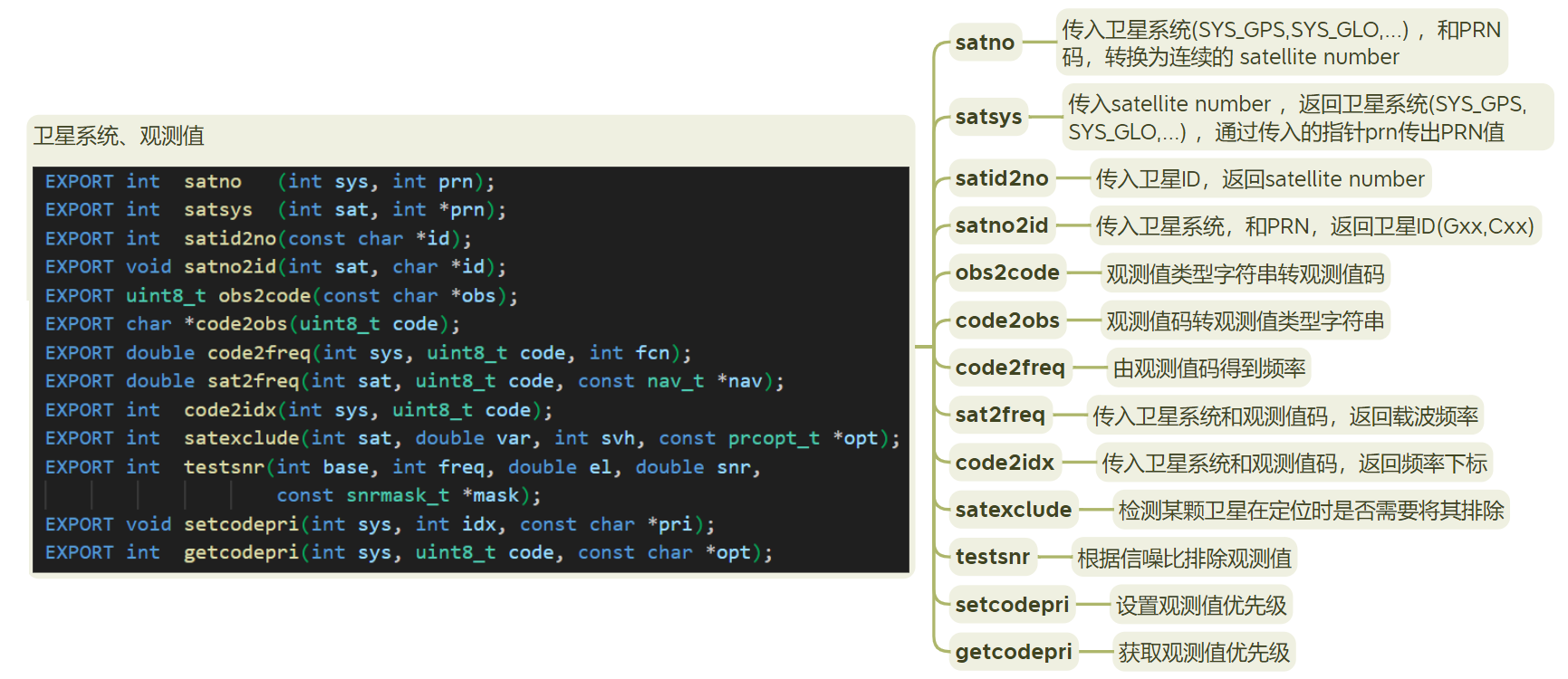
卫星系统定义:算的时候得知道观测值是哪个卫星系统的,有两套表示方法:
- 表示卫星系统的字母:GRECJIS;
- 或者 7 位二进制码 SYS_xxx,对应位写 1 表示有对应的系统,做或算可加系统,做与运算判断有无系统。
-
卫星定义:解算的时候需要知道观测值是哪颗卫星的,也有两套表示方法:
- 可以表示为各系统的卫星 ID(系统缩写+PRN):B02、C21;直观且含义明确,但不好处理。
- 也可表示为连续的整型数字 satellite number,好处理,方便遍历。
-
观测量定义:C:伪距、D:多普勒、L:载波相位、S:载噪比;
CODE_XXX:观测值类型定义,用一串连续的数字表示。 -
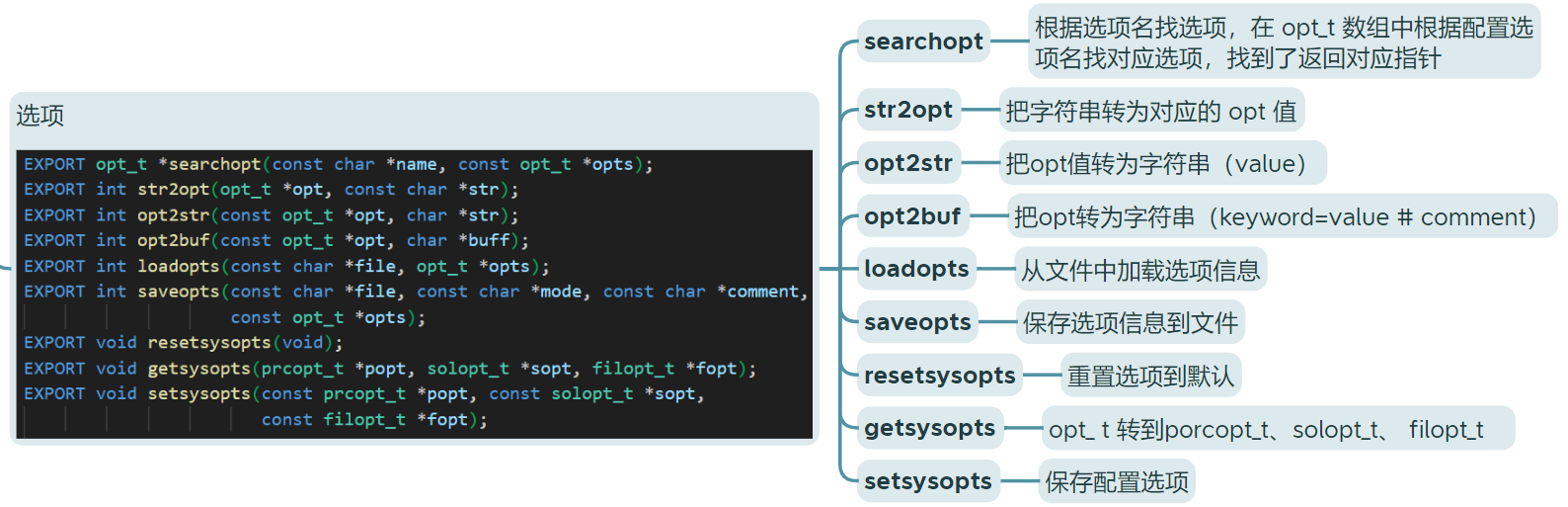
配置选项:主要是三个结构体:
prcopt_t存处理选项、filopt_t存文件路径、solopt_t存结果输出格式;默认处理选项、结果选项要理解,常用的处理选项要记住。 - 后处理解算大致流程:结合流程图把 rnx2rtkp、postpos、procpos、rtkpos 看明白,知道配置存到哪、数据存到哪、结果存到哪、哪个函数把数据读进来、SPP/RTK/PPP 分别在哪些函数进行、前向滤波/后向滤波区别。
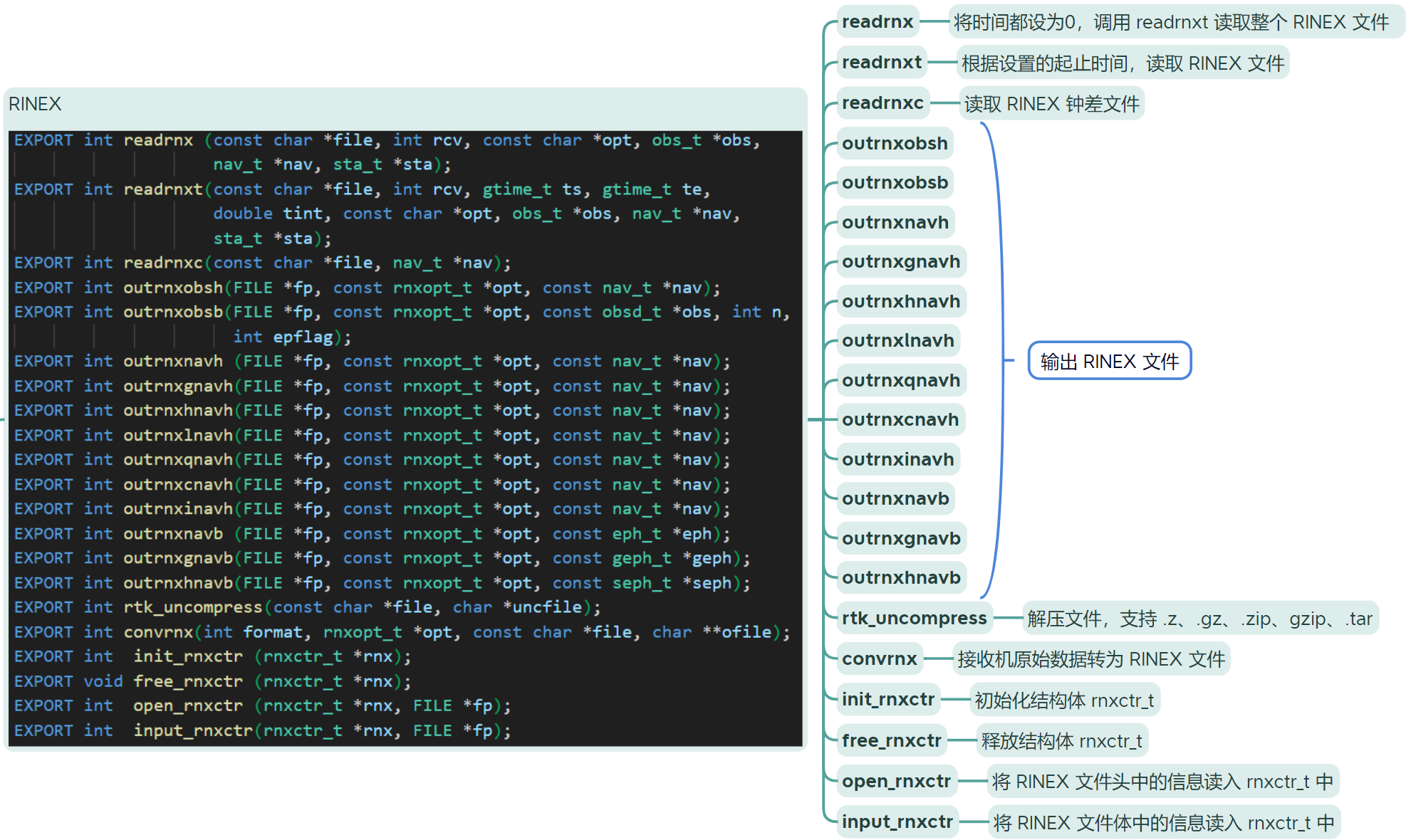
- RINEX读取:不用太细看,对数据格式有个基本的认识,知道读进来的数据以什么形式,存到什么变量里就行。
- Trace 输出:知道怎么打开和关闭 Trace 输出、设置 Trace 等级,出了问题能根据 Trace 输出定位到出错位置、看明白出错原因。
-
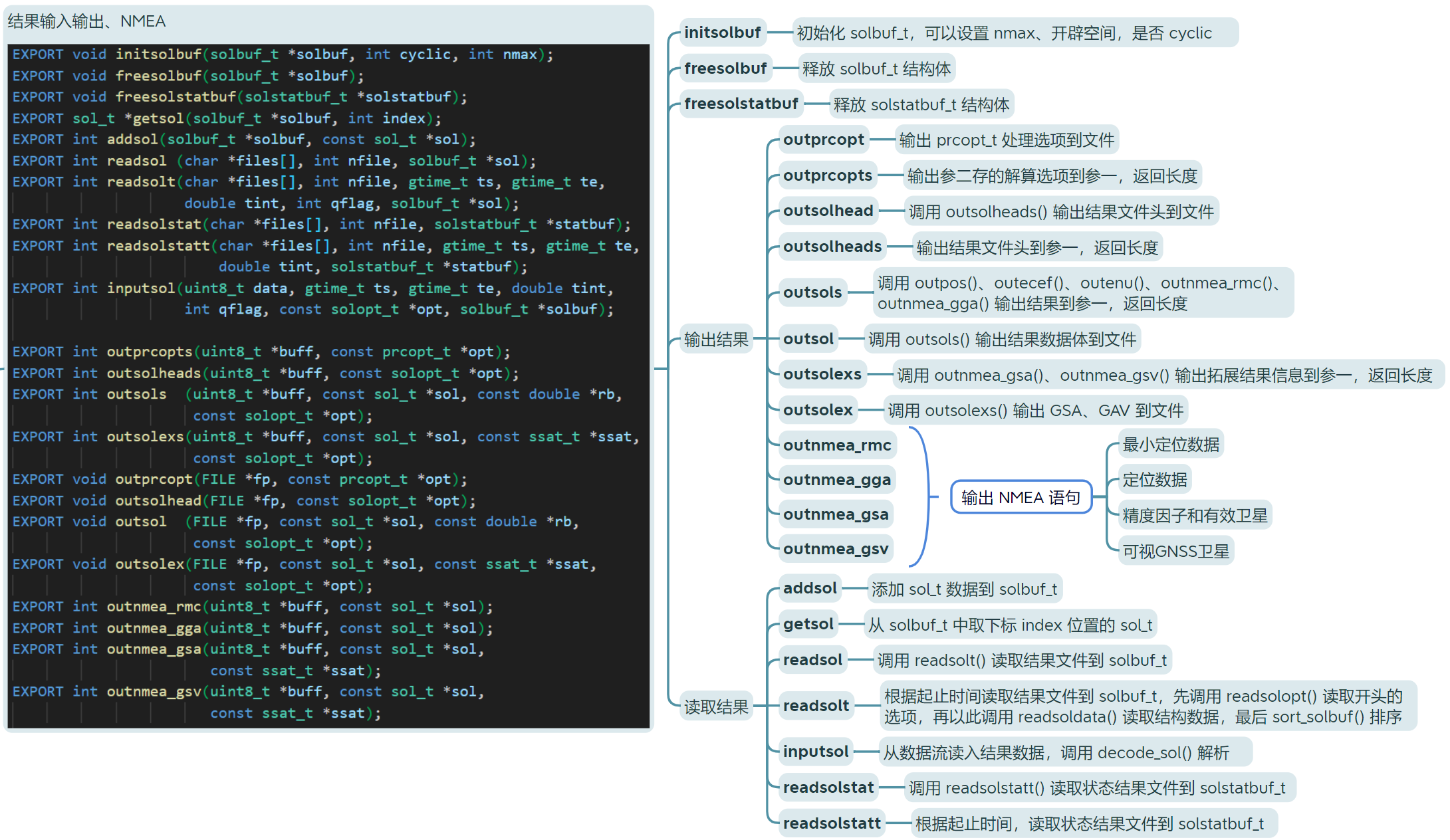
结果输出:有两套,一套是输出定位结果,包括位置速度钟差以及它们的协方差等,存在
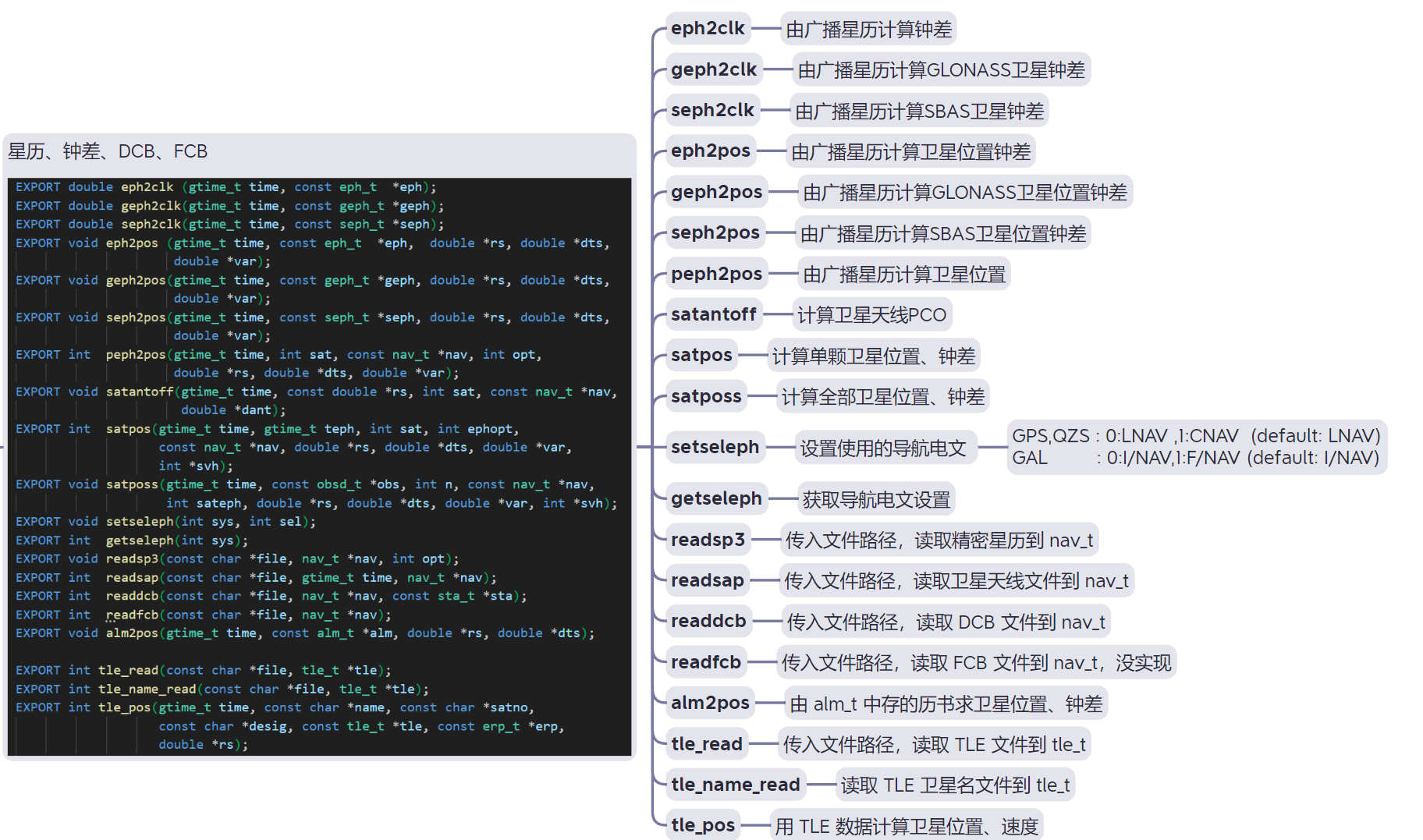
sol_t、solbuf_t中,由outsol()函数输出;一套输出解算中间结果,包括高度角方位角残差等,存在solstat_t、solstatbuf_t中,由outsolstat()输出。 - 卫星位置计算:精密星历和广播星历都是读文件套公式计算,对照着代码看一遍文件格式和公式,有点点印象,知道 BDS、GLONASS 和其它系统计算的区别就可以。
-
卫星钟差计算:用广播星历里的
$a_0,a_1,a_2$ 二次函数拟合系数算,迭代三次,要做群波延迟校正、相对论效应改正。 -
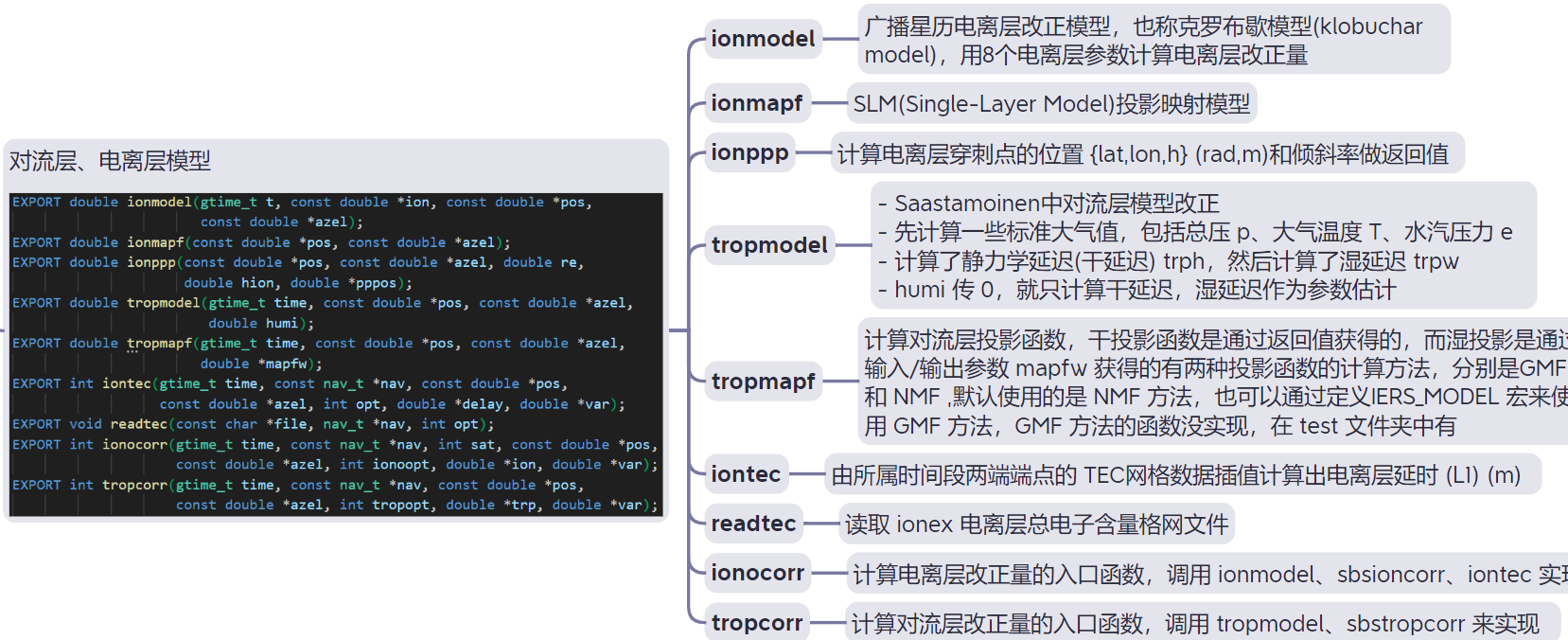
电离层改正:当信号通过电离层时,传播速度和传播路径会发生改变,带来电离层延迟;大小与电子密度成正比,对载波和伪距影响相反,不同信号频率延迟不同,影响可达数十米。
- 克罗布歇模型电离层改正:
- 电离层 INOEX 文件:
- 估计电离层 STEC:
-
对流层改正:信号穿过对流层时,由于传播介质密度的增加,信号传播路径和传播速度会发生改变,带来对流层延迟。与频率无关,对载波和伪距影响相同。对流层延迟一般可分为干延迟和湿延迟,对于载波相位和伪距完全相同,一般在米级大小。
- Saastamoninen 模型:对流层分为两层进行积分,一层温度视为常数、一层温度有变化,然后按照天顶距三角函数展开逐项进行积分, 并把对流层天顶延迟分为对流层干延迟和湿延迟两个分量之和。
- 标准大气模型:根据经验模型计算求大气压 P、温度 T、大气水汽压力 e。
- GPT 模型:GPT 模型的气压温度算的准一点,利用欧洲中尺度天气预报中心 长期的再分析气象资料建立的全球气象参数经验模型, 仅需知道测站地理位置信息与年积日便可以获得地表温度、大气压力和水汽压等气象参数。
- 估计对流层 ZTD:
- 天线相位改正:包括卫星端和接收机端、PCO 和 PCV,GNSS 观测量是卫星和接收机天线相位之间的,而不是几何中心,需要转到几何中心,常通过 igs14.atx 文件来改正。不研究这个方向,就不用太细看,
- 天线相位缠绕:
-
地球自转改正:也称 Sagnac 效应改正,卫星信号到达地球时 ECEF 坐标系会绕地球时转动
$\omega r$ ,计算卫星与接收机间的几何距离时需要套公式改正。 - 潮汐改正:地球并非刚体,会在日月引力、地球负荷作用下产生周期性形变,分为固体潮、极潮、海洋潮,改正的时候先算日月坐标,然后套公式计算。
- 观测值排除:星历缺失、高度角、信噪比、人为排除卫星、URA。
- 差分码偏差 DCB:GPS 广播星历是相对 P 码而言,而我们普通用户定位解算的时候用 C/A 码,需要通过 DCB 文件中的参数或者广播星历中的 TGD 来把测量的伪距归化到 P 码。BDS、GLONASS、Galileo 也类似。
- 单频单系统伪距单点定位:高度角方位角、卫地视线向量、近似距离计算,设计矩阵 H、新息向量 V 的构建,量测协方差阵 var
- 多系统:多系统涉及到系统间偏差 ISB,以系统间时间偏差为主,还包括硬件延迟,每多一个系统,就要多估计一个相对于 GPS 的 ISB,增广参数向量和设计矩阵。
- DOP 值计算:反映卫星的几何分布,GAMP 里用
- RAIM-FDE:定位解算迭代若干次之后,残差仍然过大,认为定位解算发射,剔除残差最大的卫星观测值再进行解算,不断重复这个过程,知道解算成功,或者卫星数量过少不足以解算。
- 多频:多频涉及到频间偏差 IFB;由于 GLONASS 信号频分多址调制,同频还存在频间偏差。
- 周跳检测:RTKLIB 实现了两套周跳检测 LLI 和 GF,检测到周跳要重置模糊度估计参数,没做周跳修复。
- 差分定位:
- 模糊度固定:
- 浮点解 PPP:理清楚改正了哪些误差,用了哪些文件,估计了哪些参数,参数的排列顺序,每种参数建立什么随机模型,初始噪声过程噪声怎么设置,出现什么情况要重置参数。
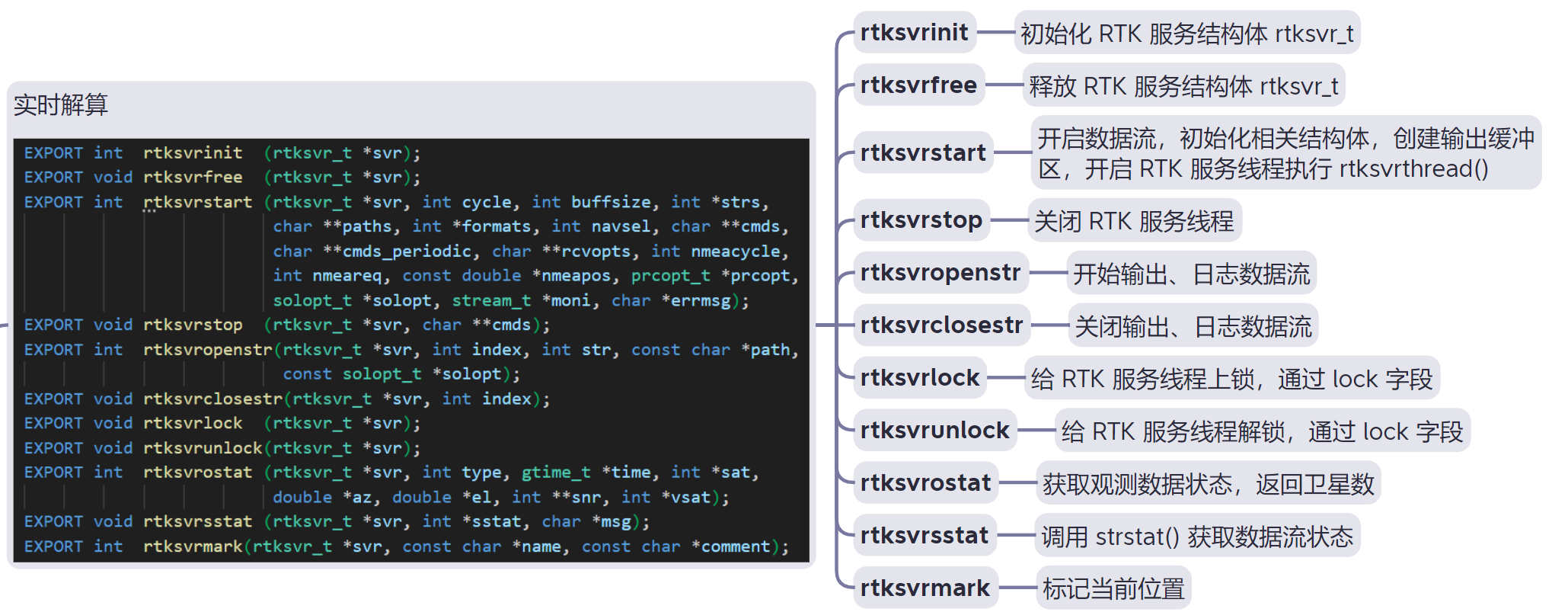
- 实时解算流程:顺着 rtkrcv 的主函数往下看,算法和后处理没啥区别,数据读取。
- 数据流:包括串口、文件、Ntrip、TCP、UDP 等
- RTCM、RAW 读取:简单了解数据格式,知道每种语句都有什么数据,用什么函数能读取到什么类型的哪个变量中。
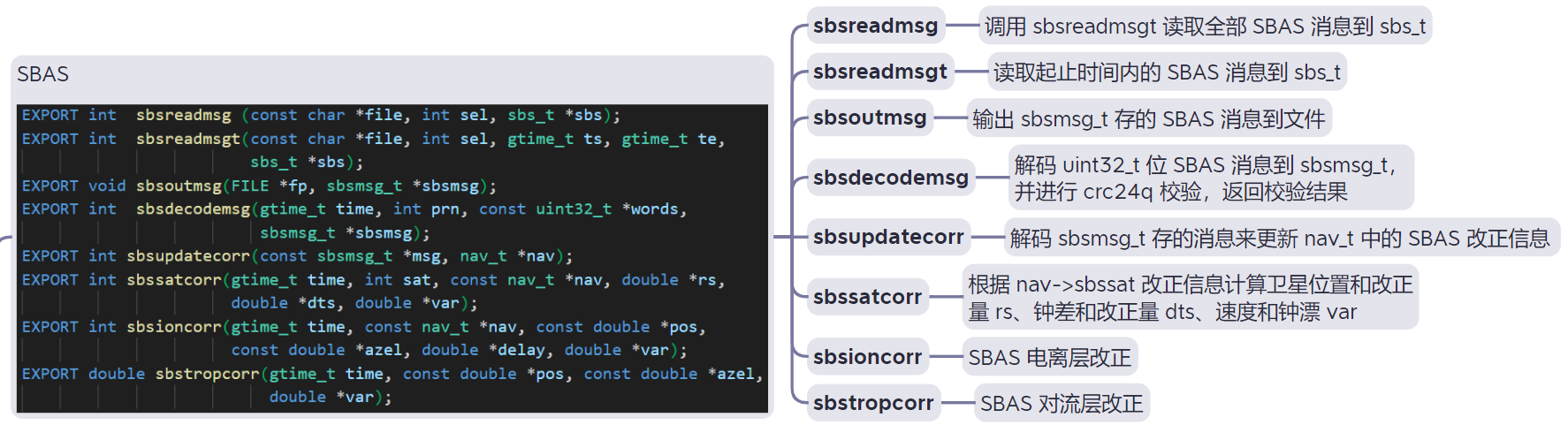
- SBAS 改正:
- SSR 改正:
总结:
- 矩阵运算、参数估计、时间系统、坐标系统、卫星和观测值的表示,是基础,要熟练掌握。
- 结果输出、Trace 输出、Rinex 和各种其它文件的读取,知道文件格式,知道大概哪个函数就行,基本不需要细致了解。
- 后处理流程要有印象,重点关注定位方程,H、V、R 矩阵的构建。了解模型改正原理,比如对流层、电离层、天线、潮汐、地球自转、引力延迟。
- 偏差的处理也算是重点,DCB、FCB、ISB、IFB,要算多系统多频,肯定得考虑。
RTKLIB 的 manual 有 181 面,先介绍附带工具包的使用,然后介绍核心代码库定义的 API,最后介绍算法模型。
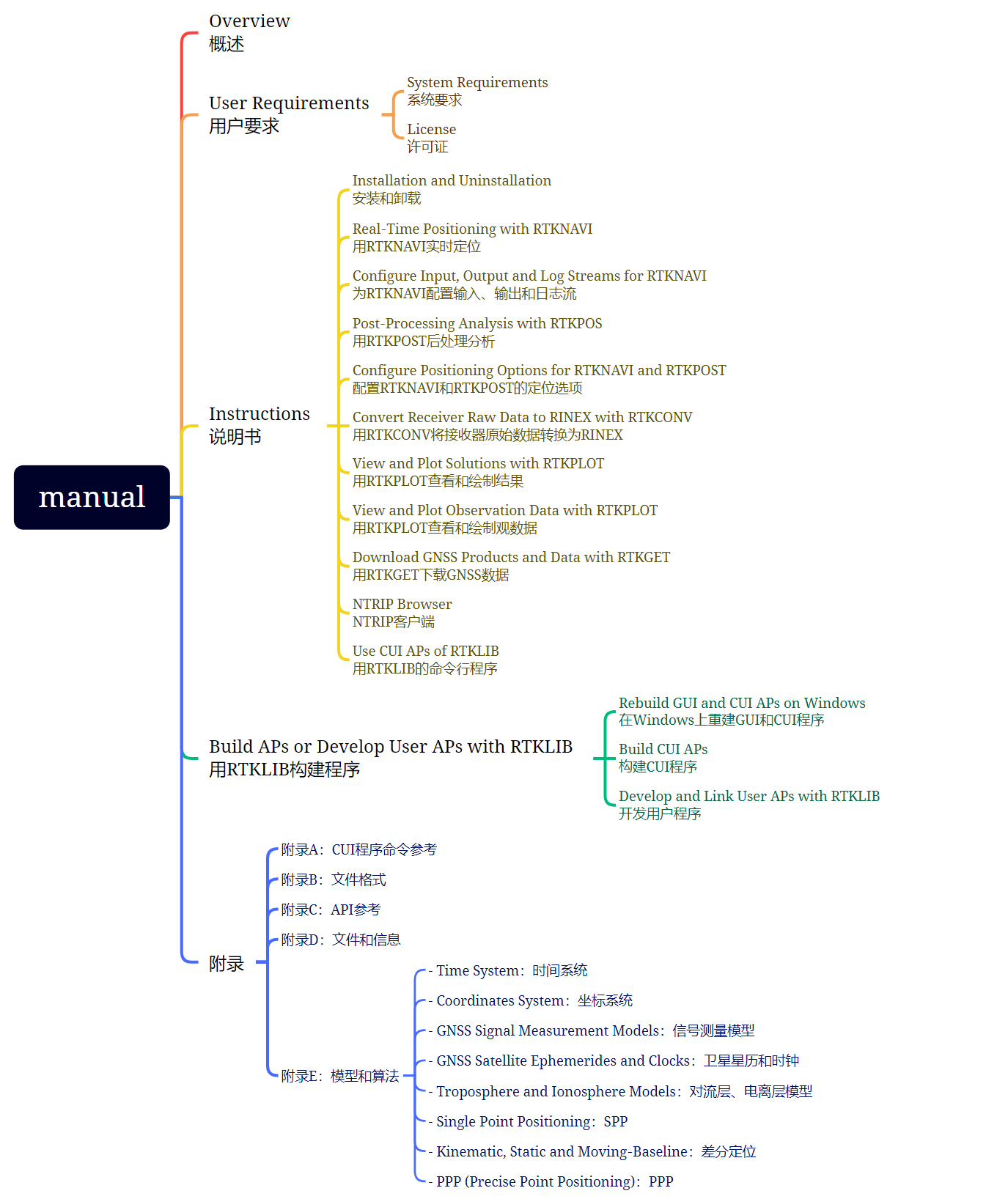
常用的英文表述最好记下来,不止后面的模型和算法有,还会出现在代码的注释里,看英文论文也经常见。

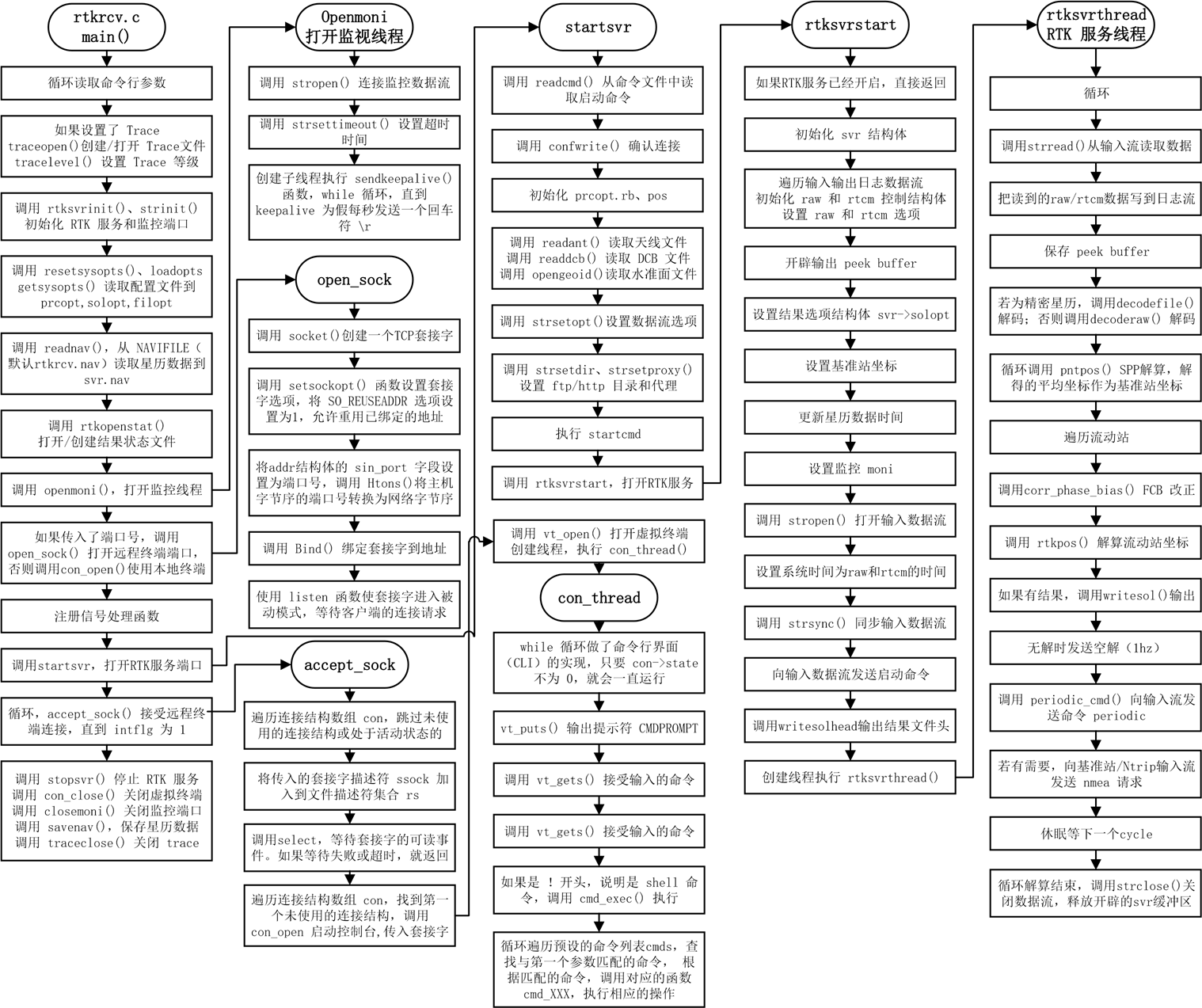
RTKLIB 有五大命令行程序:rnx2rtkp(后处理定位解算)、rtkrcv(实时定位解算)、str2str(数据流转发)、convbin(数据格式转换)、pos2kml(定位结果转谷歌地图格式)。除 rtkrcv 外用本章所给步骤都可以编译调试。
rtkrcv 无法直接在 Windows 下编译调试,因为它依赖了一些 Linux 库,这个issue说是用VS编译RTKRCV成功过,可以试试看:https://github.com/tomojitakasu/RTKLIB/issues/407。
一般都是用 VS 编译调试 rnx2rtkp,做后处理定位解算,做二次开发改算法,断点调试很方便。
在RTKLIB官网选最新版 2.4.3 b34,点Source Programs and Data下面的GitHub进入GitHub页面,点开绿色的Code下拉菜单,再点Download ZIP,下载解压即可。

-
创建C++空项目,可以勾选“解决方案和项目放在统一目录中”,记住创建的项目目录。
-
把 RTKLIB 源码文件中整个src文件夹复制到创建的项目文件目录中。
-
把 RTKLIB 源码文件中 \app\consapp 中的 rnx2rtkp.c 放到刚刚复制过去的 src文件夹。
-
在解决源文件中添加名为 “src” 的筛选器,再在 src 筛选器下面添加名为 “rcv” 的筛选器 。
右键添加现有项目把 src/rcv文件夹 中的所有文件加到 src/rcv筛选器 中,src 中所有代码文件加到 src 筛选器中。
-
把主函数 rnx2rtkp.c 文件中的 #include "rtklib.h" 修改为 #include "./rtklib.h“
把在 src/rcv文件夹几个的.c文件 中的 #include "rtklib.h" 修改为 #include "../rtklib.h”
-
打开项目属性,在链接器—输入—附加依赖项中添加依赖库winmm.lib和ws2_32.lib。
-
配置属性—高级—字符集中设置为用使用多字节字符集 。
-
C/C++中的SDL检查设置为否,附加包含目录添加**.\src** 、预编译头为不使用预编译头 。
预处理器中添加如下内容:
_LIB _CRT_SECURE_NO_WARNINGS _WINSOCK_DEPRECATED_NO_WARNINGS ENAGLO ENACMP ENAGAL DLL WIN32 TRACE-
尤其主要加 WIN32,好多博客都没加这一项,加了这一项后 RTKLIB 就不会用 Linux 下的 <pthread.h> 和 <sys/select.h>,咱们项目要在 Windows 下编译运行的,不加会报 ”找不到 <pthread.h> 和 <sys/select.h>“ 的错。
-
不加 TRACE 没法输出 trace 文件。
-
-
将常规中的目标文件名改为 rnx2rtkp 。
改不改都行,默认目标文件名是项目名。
可能会报使用了可能未初始化的本地指针变量 “sbs” 的错误,解决方式是对指针变量进行初始化,将 ephemeris.c 文件中的第 579 行改为 const sbssatp_t *sbs=NULL;,还有些未初始化只报了警告,可以不用理会。
命令行程序都是命令行参数来
完全自己写容易出错,要用的时候建议直接在以前写好的命令基础上改。
-
GNSS定位解算必须要输入星历数据和观测数据才能进行
-
默认输出:
-
Trace 设置:
rnx2rtkp 的命令行参数很复杂,一不下心就会出错,这时候可以去看 trace 文件,重点看出现 error 的部分,复制 error 信息的前半部分,去程序里搜索,定位到出现错误的地方,在附近设几个断点,看看到的是咋错的。
比如我的朋友按照吴桐的博客运行 rnx2rtkp,出错了来问我:

-
首先看左边的 trace 输出,有两行里显示 error,说是打开观测文件和星历文件时候出错了。
-
复制前面的 ”rinex file error“,在代码中全局搜索,发现只有在
readrnxfile()函数里有可能输出这段信息。 -
可以明显看出来是
fopen()根据路径打开文件的时刻出错了,那就在fopen()的那一行设断点,看看打开文件路径到的是什么。 -
最后调试发现,路径中
\都是连续出现四个。推测分析是因为朋友的 VS 版本,输完的命令行参数,会自动把其中的\换成\\,自己输文件路径的时候只要一个\就行了。-x 5 -p 0 -m 15 -n -o D:\\source\\RTKLIB-rtklib_2.4.3\\rtklib\\out.pos D:\\source\\RTKLIB-rtklib_2.4.3\\test\\data\\rinex\\07590920.05o D:\\source\\RTKLIB-rtklib_2.4.3\\test\\data\\rinex\\07590920.05n要改成:
-x 5 -p 0 -m 15 -n -o D:\source\RTKLIB-rtklib_2.4.3\rtklib\out.pos D:\source\RTKLIB-rtklib_2.4.3\test\data\rinex\07590920.05o D:\source\RTKLIB-rtklib_2.4.3\test\data\rinex\07590920.05n
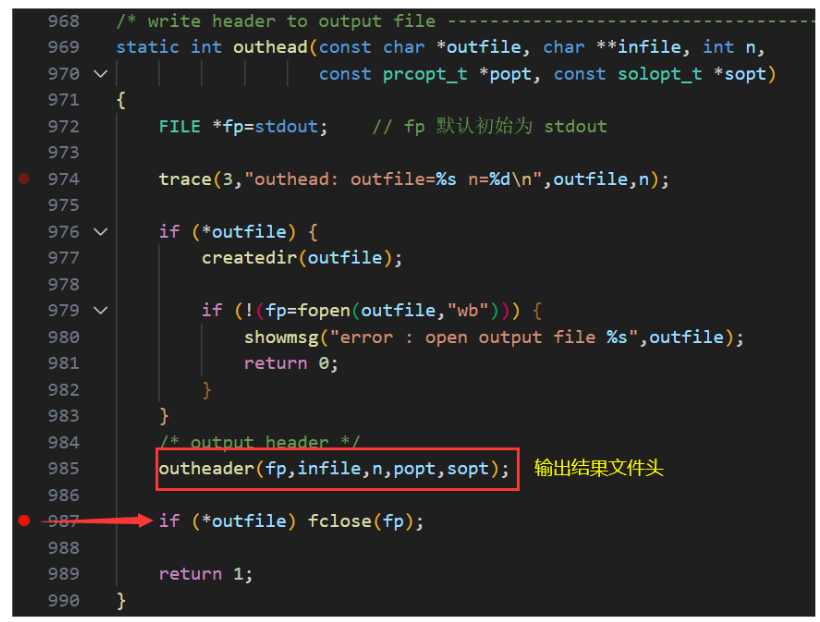
再比如,程序运行结束看不到结果输出,可以在 outhead() 下面位置设断点,看看 outfile 变量里存没存文件路径,那个位置有没有输出了文件头的结果文件。
再比如文件路径中间如果出现空格,会被识别成两个不同的命令行参数,像下图所示的错误:
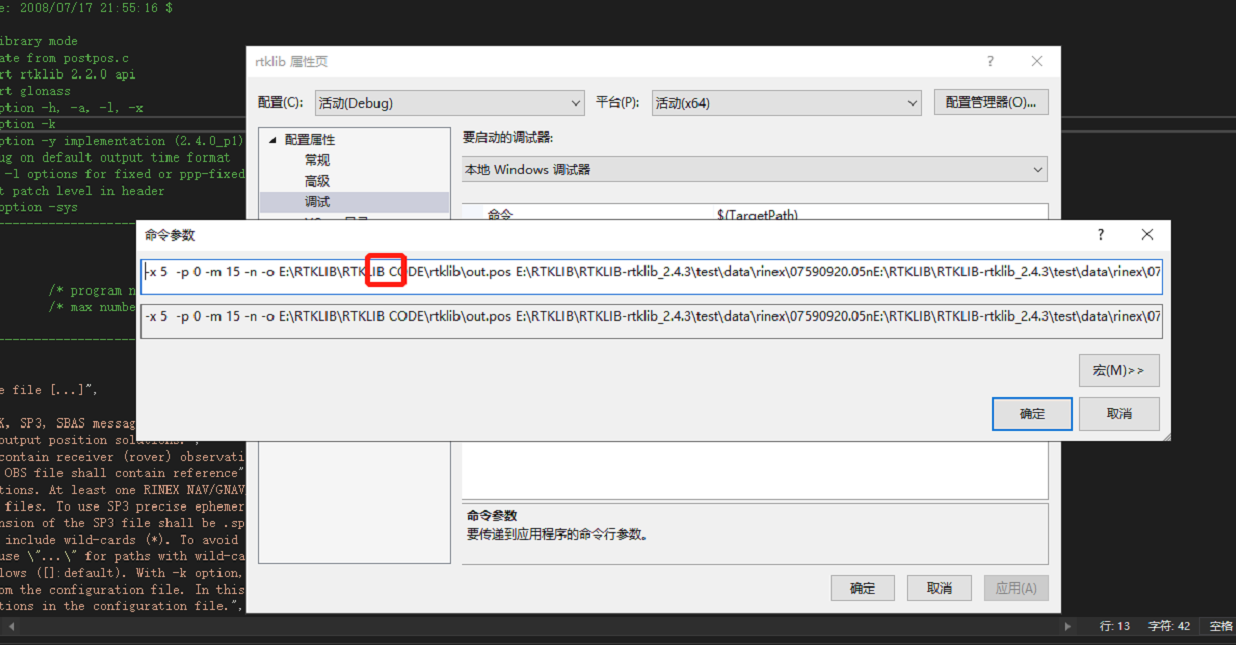
每个人遇到的问题都不见得相同,我觉得最好不要一上来就问师兄或者老师,把自己能想到的方法都试试,"调试" 嘛,就是得多调多试,。
开发中经常要用到 Linux,
WSL 全称 Windows Subsystem for Linux,是在 Widows 电脑上开发调试
-
指定最小 CMake 版本、子项目名
cmake_minimum_required(VERSION 3.0) project(rtklib)
-
设置编译时 gcc 参数:
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -std=c99 -Wall -O3 -ansi -pedantic") set(CMAKE_C_FLAGS "-Wno-unused-but-set-variable -Wno-format-overflow -Wno-unused-result -Wpointer-to-int-cast")
-
指定头文件目录:
include_directories(include)
-
指定可执行文件的输出路径为:rtklib/bin、库文件的输出路径为:rtklib/lib:
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin) set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
-
将 src、src/rcv 目录下源文件加到 DIR_SRCS 列表:
aux_source_directory(src DIR_SRCS_RTKLIB) aux_source_directory(src/rcv DIR_SRCS_RTKLIB_RCV) list(APPEND DIR_SRCS ${DIR_SRCS_RTKLIB} ${DIR_SRCS_RTKLIB_RCV})
-
把代码编译成动态库,链接上 pthread m 库:
add_library(${PROJECT_NAME} SHARED ${DIR_SRCS}) target_link_libraries(${PROJECT_NAME} pthread m) target_include_directories(${PROJECT_NAME} PUBLIC ${PROJECT_SOURCE_DIR}/include )
-
如果是 WIN32 还有链接上 wsock32 ws2_32 winmm 库,加上宏定义 -DWIN_DLL:
if(WIN32) target_link_libraries(${PROJECT_NAME} wsock32 ws2_32 winmm) add_definitions(-DWIN_DLL) endif()
RTKLIB APP 目录下有 5 个命令行程序
- rnx2rtkp:后处理定位解算
- rtkrcv:实时定位解算
- str2str:数据流转换播发
- convbin:数据转换
- pos2kml:定位结果转谷歌地图数据格式
可以用一个 CMake 工程同时构建这几个命令行程序:
cmake_minimum_required(VERSION 3.0)
project(RTKLIB-CMake)
# set build flags.
set(CMAKE_CXX_FLAGS "-std=c++20" )
set(CMAKE_CXX_FLAGS "-fpermissive")
if ("${CMAKE_BUILD_TYPE}" STREQUAL "Release")
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS} -O3 -fsee -fomit-frame-pointer -fno-signed-zeros -fno-math-errno -funroll-loops")
endif()
# set output dir
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/app/bin)
set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/app/lib)
# RTKLIB
add_definitions(-DENAGLO -DENACMP -DENAGAL -DNFREQ=3 -DNEXOBS=3 -DDLL)
add_subdirectory(rtklib)
# VT
add_library(vt vt/vt.c)
target_link_libraries(vt rtklib)
target_include_directories(vt PUBLIC vt)
# executable
add_executable(RNX2RTKP app/rnx2rtkp.c)
target_link_libraries(RNX2RTKP rtklib)
add_executable(RTKRCV app/rtkrcv.c)
target_link_libraries(RTKRCV rtklib vt)
add_executable(STR2STR app/str2str.c)
target_link_libraries(STR2STR rtklib)
add_executable(CONVBIN app/convbin.c)
target_link_libraries(CONVBIN rtklib)
add_executable(POS2KML app/pos2kml.c)
target_link_libraries(POS2KML rtklib)比如我用 C++ 语法,通过调用 RTKLIB 的函数,实现获取当前系统时间,输出年月日时分秒、GPS周 + 周内秒,主函数文件如下:
代码库是 RTKLIB 的核心,要不咋能叫"LIB"呢?
RTKLIB 提供许多代码库和 API,包括:卫星和导航系统函数、矩阵和向量函数,时间和字符串函数、坐标的转换,输入和输出函数、调试跟踪函数、平台依赖函数、定位模型、大气模型、天线模型、地球潮汐模型、大地水准面模型、基准转换、RINEX函数、星历和时钟函数、精密星历和时钟、接收机原始数据函数、RTCM 函数,解算函数、谷歌地球KML转换、SBAS函数、选项(option)函数、流数据输入和输出函数、整周模糊度解算、标准定位、精密定位、后处理定位(解算)、流服务器函数、RTK服务器函数、下载函数。
头文件 rtklib.h 是库的核心 ,主要有四大部分:宏定义、结构体定义、全局变量、函数定义
需要注意并非所有函数都可以直接调用,只有加了 EXPORT 前缀,而且在 rtklib.h 中声明了才行。有些 static 小函数在 rtklib.h 没声明,只在 .c 源文件里定义了,在它定义的 .c 源文件以外不能直接调用;想调用它也很简单,只需要把前缀改成 EXPORT,然后在 rtklib.h 中加上声明。
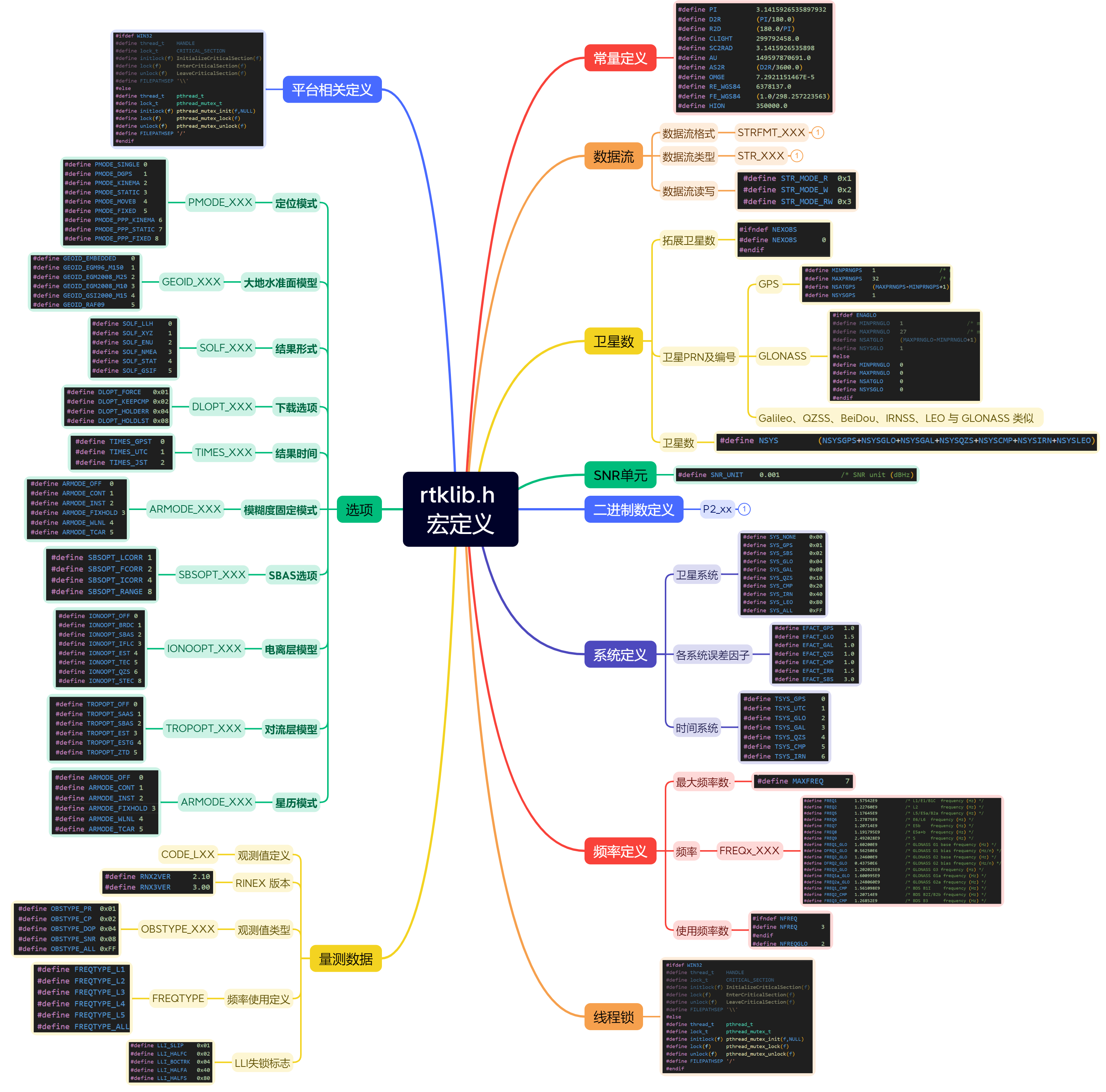
各种 ifdef
-
WIN32、WIN_DLL:用 Windows 下的代码,
-
ENAGLO、ENAGAL、ENAQZS、ENACMP、ENAIRN、ENALEO:启用除 GPS 外的卫星系统,
-
OBS_100HZ:判定时间重合的阈值 DTTOL
-
MKL:
-
LAPACK:
-
IERS_MODEL:
-
CPUTIME_IN_GPST:
-
CLOCK_MONOTONIC_RAW:
-
RRCENA:
-
SVR_REUSEADDR:
-
TIME_64BIT:

extern const double chisqr[];:卡方检验表extern const prcopt_t prcopt_default;:默认处理选项extern const solopt_t solopt_default;:默认结果选项extern const sbsigpband_t igpband1[9][8];:SBAS IGP 波段 0-8extern const sbsigpband_t igpband2[2][5];:SBAS IGP 波段 9-10extern const char *formatstrs[];:数据流格式字符串extern opt_t sysopts[];:系统选项表
-
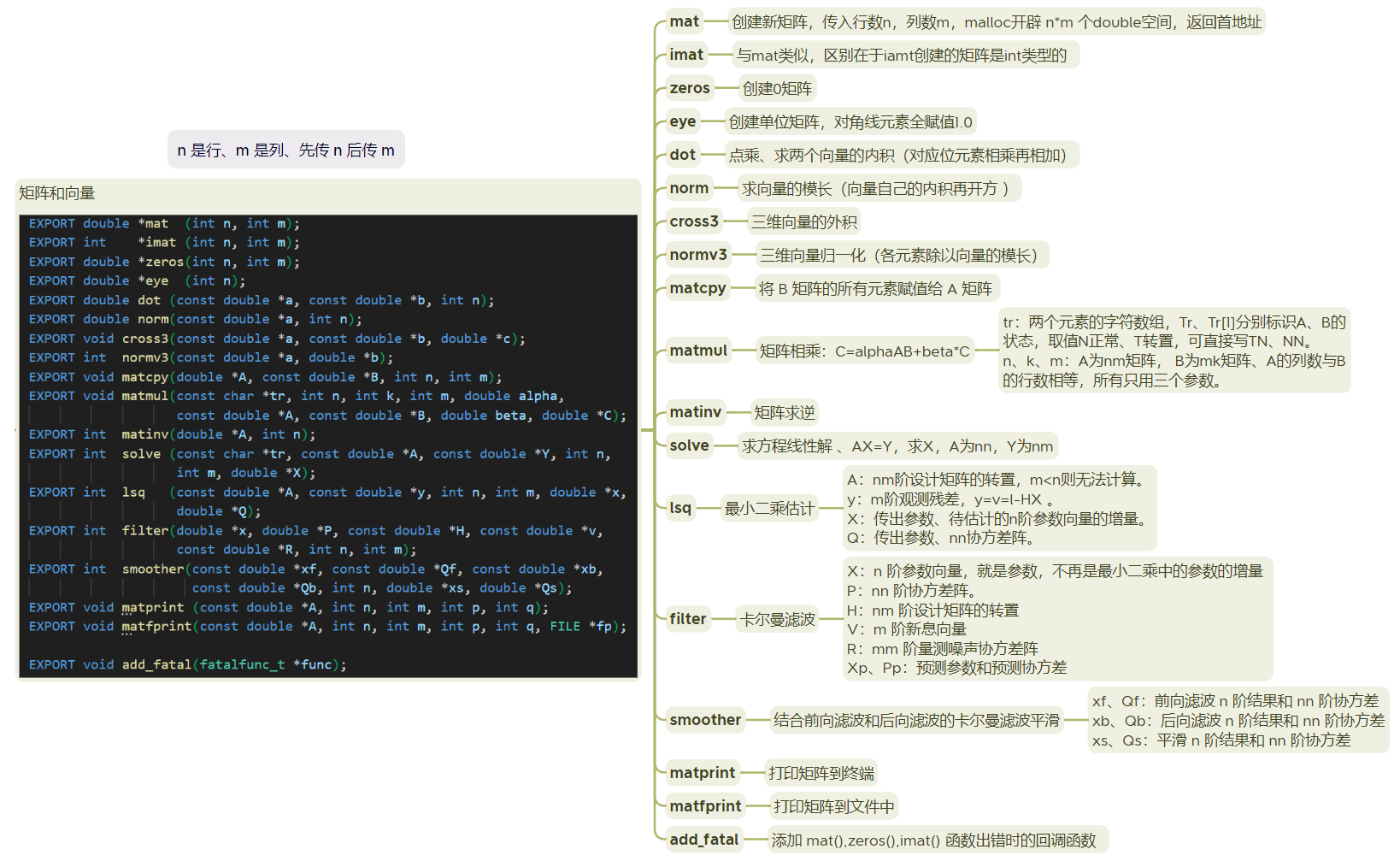
RTKLIB 中用 double 类型一维数组表示矩阵,不能自动识别矩阵的行列数,每次传矩阵的时候都要传入行数 n、列数 m。
-
用矩阵的时候要先 malloc 开辟空间,用完记得 free 释放空间。
-
要能熟练计算矩阵加减乘除转置求逆。
-
RTKLIB 没有实现矩阵加减的函数,用的时候直接写 for 循环,比如把三维向量 dx 加到 X 上:
for (i=0;i<3;i++) X += dx;
-
矩阵求逆用的 LU 分解法,时间复杂度
$O^3$ ,对于大规模的矩阵,如果利用矩阵的稀疏性和对称性等特性,而且当使用不完全分解方法(例如,只计算到一定程度或使用截断技术)时,LU 分解的效率会更高。 -
matprint() 很常用,调试的时候很难直接看的矩阵元素的值(都是指针),得输出到终端或者文件再看。
- RTKLIB 中时间一般都以
gtime_t类型存储,为了提高时间表示的精度,分开存 GPST 时间的整秒数和不足一秒的部分。 - 经常需要做年月日时分秒、周+周内秒、GPST 三种时间之间的转换;输出北京时间要在 UTC 基础上加 8 小时。
- BDT、GLONASST 不用于计算,读完文件就转为 GPS 时间了。
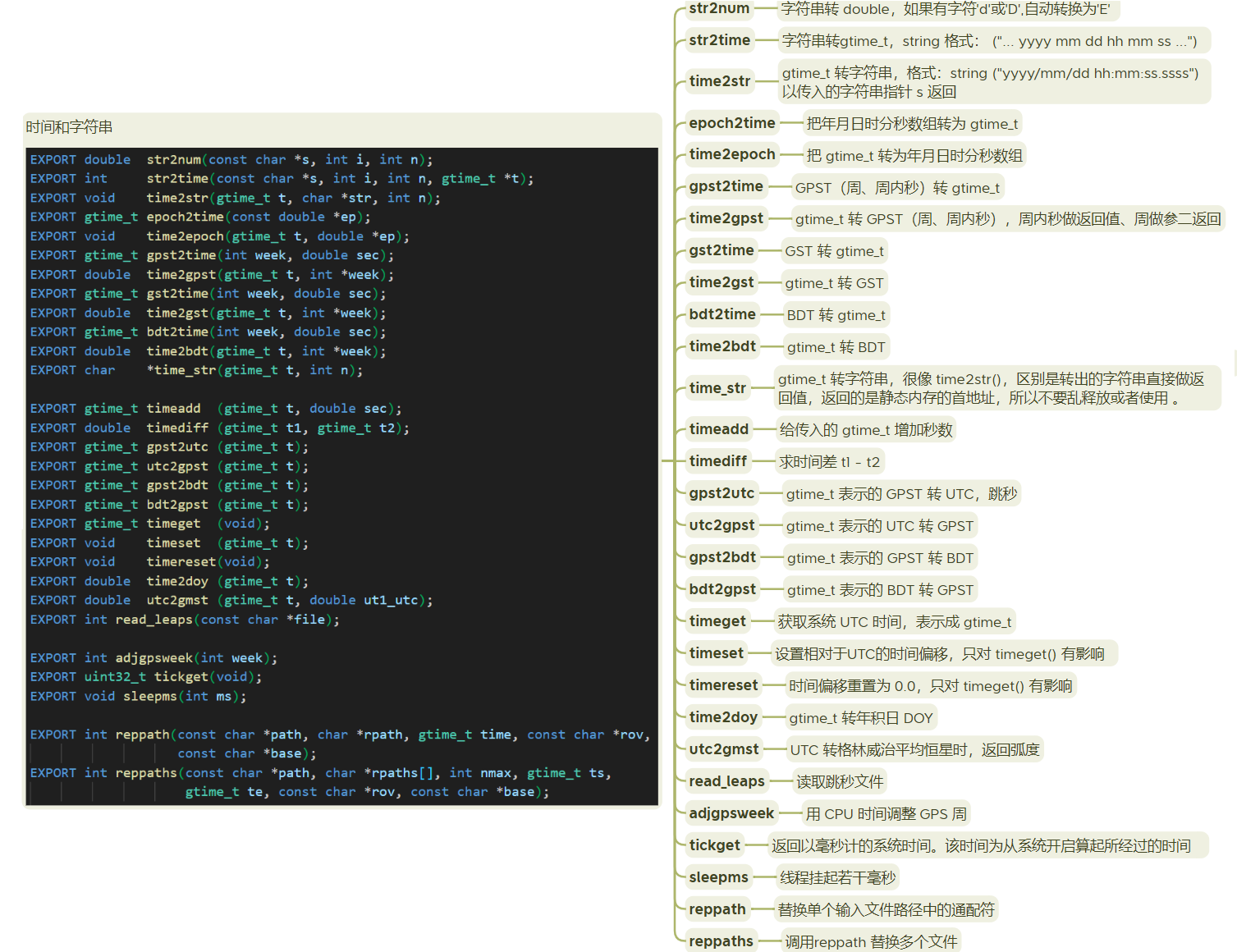
- ECI 用的很少,只在
sunmoonpos()函数中计算日月坐标时候用到了,不用怎么关注。 - ENU、ECEF、LLH 三套坐标系都频繁使用,要熟练掌握他们之间的转换,包括协方差的转换
- ENU 是局部相对坐标系,以某一个 LLH 坐标为原点,坐标转换的时候要传入这个 LLH 坐标。
- ENU 常用
e表示、ECEF 常用r表示、LLH 常用pos表示。
- 卫星系统表示:
- 表示卫星系统的字母:GRECJIS。
- 7 位二进制码表示,对应位写 1 表示有对应的系统,做与运算可加系统。
- 卫星的表示:
- 可以表示为各系统的卫星 ID(系统缩写+PRN):B02、C21。
- 也可表示为连续的卫星编号 satellite number,断点调试或者看 Trace 文件的时候,经常只能看到卫星编号。
- 观测值类型:
- C:伪距、D:多普勒、L:载波相位、S:载噪比。
CODE_XXX:观测值类型定义,用一串连续的数字表示。sigind_t:表示每种卫星系统的载波类型和观测值类型 ,每种类型的系统其实对应的就是一个sigind_t结构体。
- 观测值优先级:
- 选择主要存在
prcopt_t、solopt_t、filopt_t三个结构体中。 - 后处理解算程序 rnx2rtkp 和实时解算程序 rtksvr 读取结果文件流程是一样的:
- 先调用
resetsysopts()重置所有配置为默认。 - 调用
loadopts()读取配置文件内容,存入opt_t的sysopt中。 - 最后调用
getsysopts()将opt_t转到porcopt_t/solopt_t/filopt_t。
- 先调用
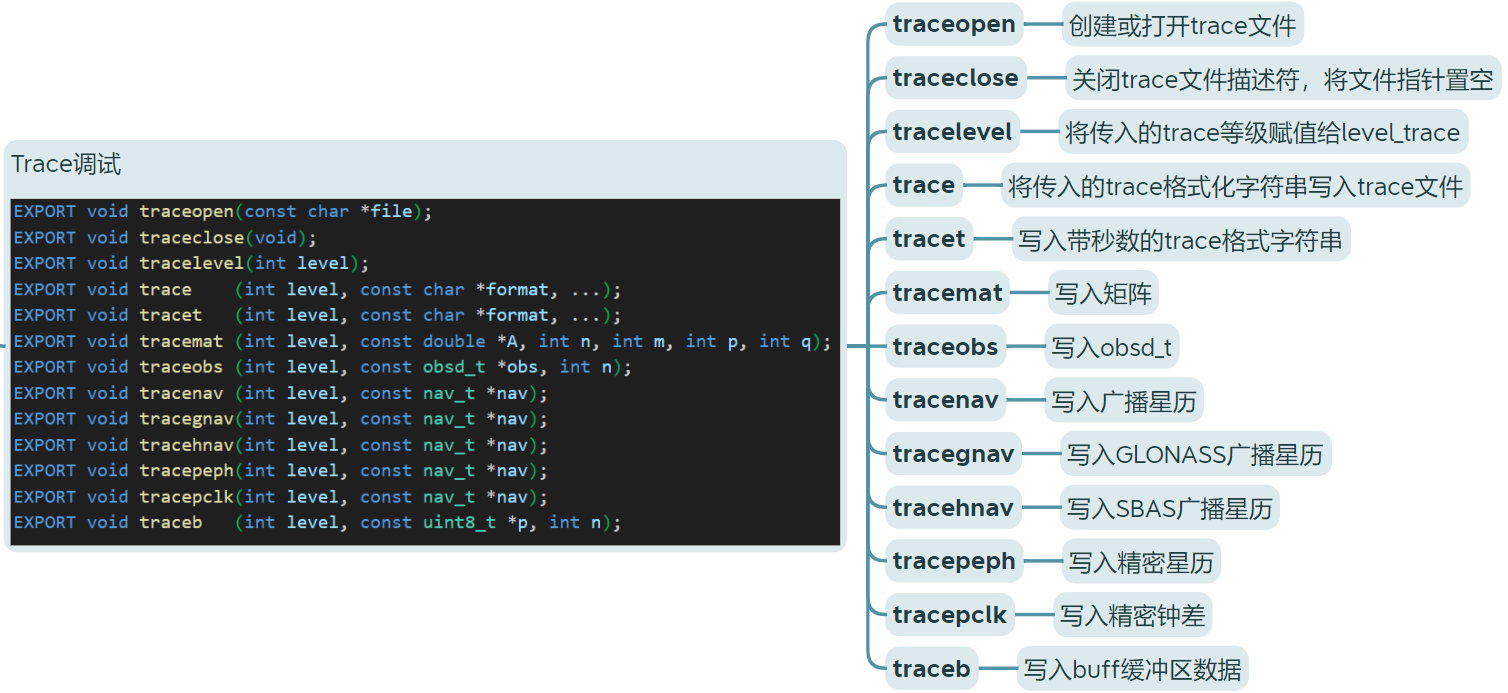
- 在 rtklib.h 中加入 #define TRACE,启用 trace ,不定义则将 trace 函数全赋空值。
- Trace 信息分五个等级,从 1-5 重要性逐渐降低,通过 tracelevel() 函数可以设置输出的最高等级,设置 2 级意味着只输出 1/2 级信息。
- 一级 Trace 是致命错误,出现一级错误基本上意味着程序无法继续执行,比如观测星历文件读取错误、内存分配错误。
- 二级 Trace 是警告,出现二级警告程序可能依然能继续执行,但也可能无法进行解算,比如改正文件读取失败,数据解析出错,二进制数据校验出错,某一历元解算失败,缺失解算所需的星历或改正参数等。
- 三级 Trace 是程序主要执行流程,主要在函数的开头,告诉我们执行到了这个函数。
- 四级 Trace 是比三级更深入的程序执行流程,主要在三级 Trace 函数的中间或者调用的子函数开头,告诉我们执行到了这个操作。
- 五级 Trace 是解算的中间过程,具体到每颗卫星,每个频点,每次循环。
- 看 Trace 文件可以辅助断点调试,甚至替代断点调试。程序执行出错,开 2/3 级 Trace,看 Trace 文件里的 error、warring 就能知道大致出了啥问题,定位出问题的函数,断点调试的时候你就知道该在哪设置断点了。
- 输出的结果有两套:
- 定位结果:坐标、协方差、有效果卫星数、差分龄期
- 解算中间结果:
- NMEA 读取:
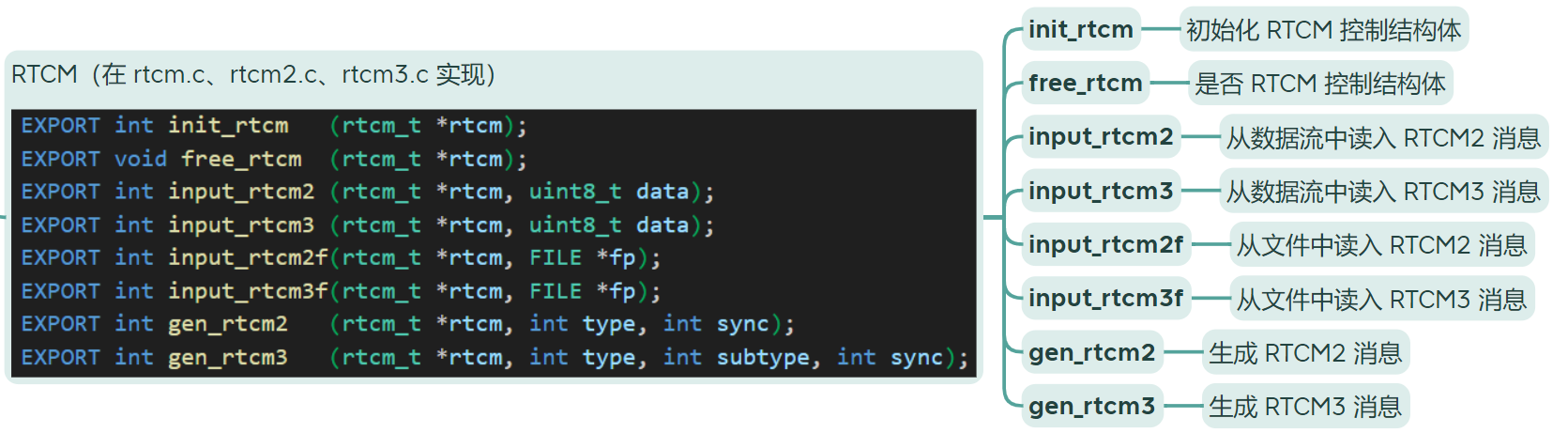
- 用完数据记得释放内存。
- 用于数据流解析。
支持的 RTCM 消息包括:

想进行定位解释至少要有星历,要有观测数据,常用 NAV 配 MSM4(伪距载波信噪比)、MSM7(伪距载波多普勒信噪比)
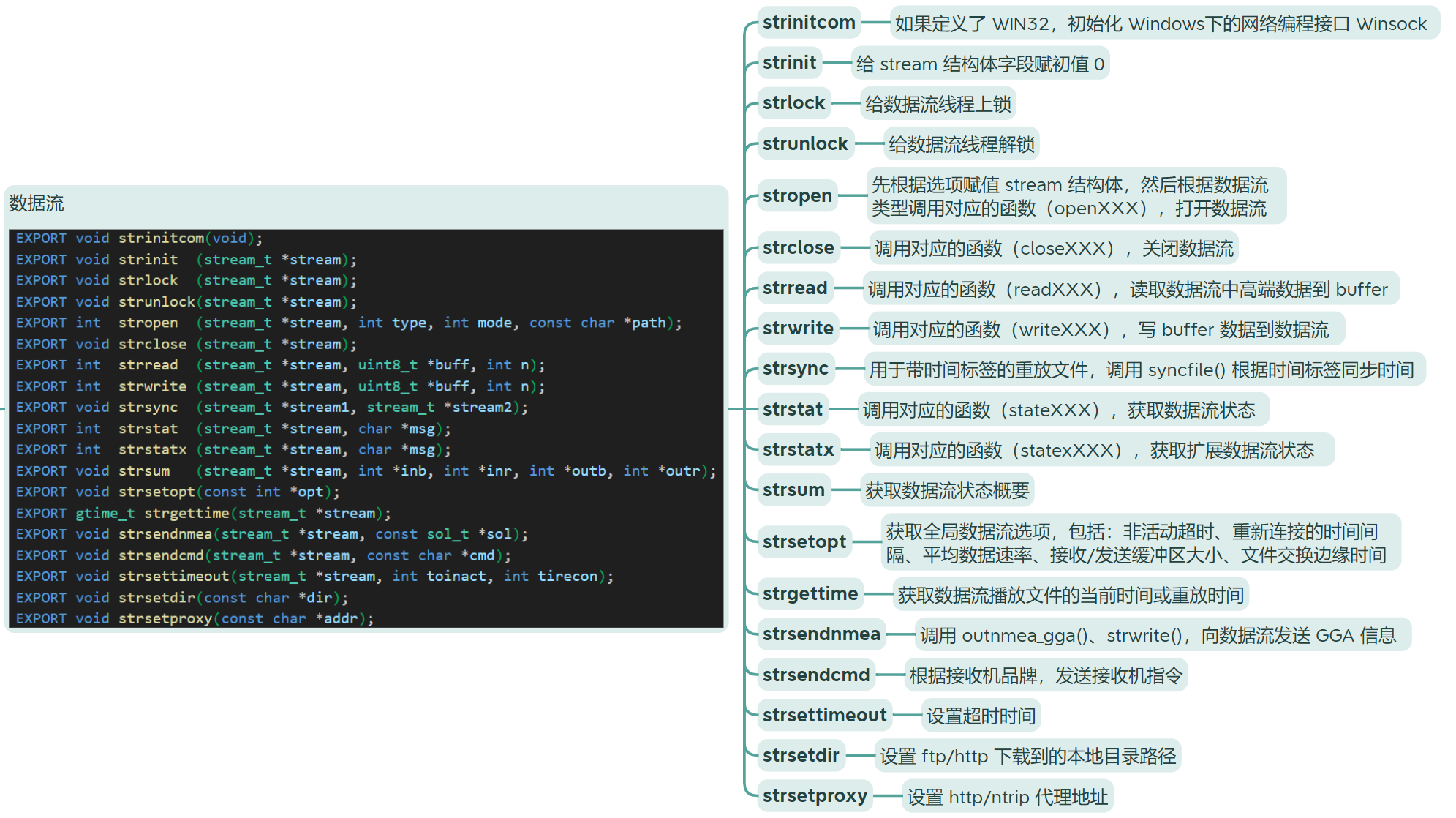
- 数据流函数用的大部分在 Window 和 Linux 各有一套,涉及到很多系统库,好在现在 AI 发达,可以用来辅助理解。
- 每种数据流关注四个函数:打开、关闭、写数据、读数据。




都是转日本的高程系统,咱们用不到。

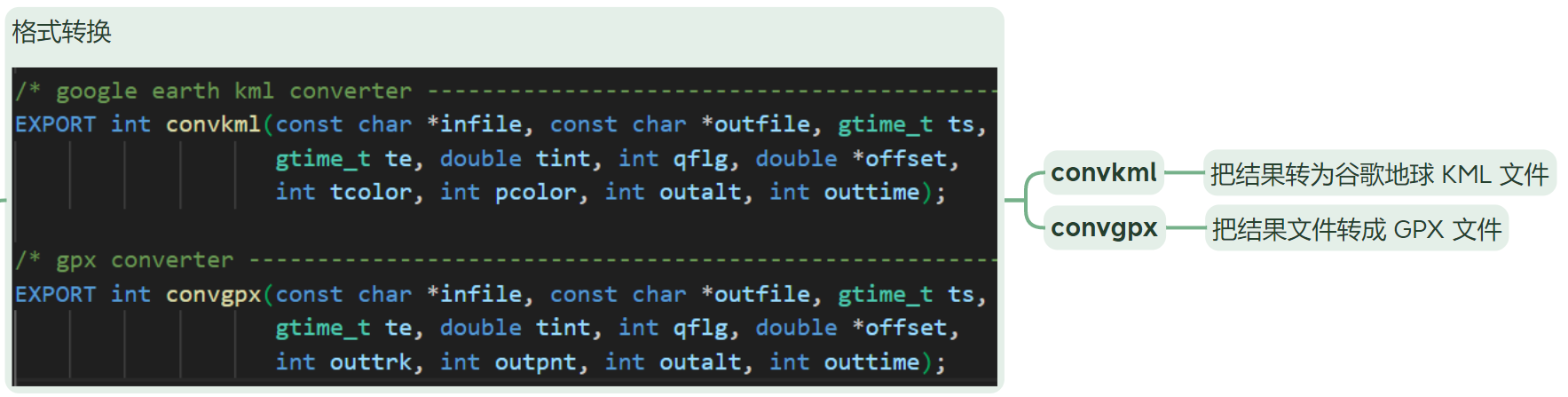
把定位结果转为 KML、GPX 格式:
- KML:
- GPX:
可以读取 shapfile 矢量数据

在 Windows 和 Linux 有完全不同的两套实现

在 rtklib.h 中声明了,在代码库中使用了,但没有实现,用代码库的时候需要我们自己实现,一般写个空函数就行。编译的时候经常会在这报错,如果说未定义就写三个空实现,如果重定义就把写的实现注释掉。
总结一些命名和函数定义习惯:
- 矩阵做参数时一点要带上维度,矩阵 m 为行、n 为列,一般先传 n 后传 m。
- 带
const的指针一定是输入参数,不带const的指针是输出参数或者既是输入也是输出。 - 类型命名结尾都带
_t,类型传参用的指针名不带_t - 用指针实现了顺序表,
- 很多读文件的函数都有结尾带 t 和结尾不带 t 两种,带 t 表示要传入开始时间和结束时间的。