Replies: 1 comment
-
|
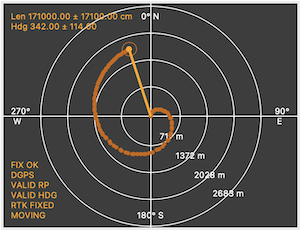
Hi @deavn2236, There's no 'off-the-shelf' solution for this in FYI the "Rover Plot" widget in the PyGPSClient GUI application does exactly this and presents the information the form of a location plot (the centre of the plot represents the base and the orange dots represent the rover vector and trace):
Suggest reading the u-blox interface documentation on the UBX-NAV-RELPOSNED message type e.g.: Hope this helps. |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
-
The program you provided is very helpful for GNSS resolution. I have a question to ask.
I'm using the ZED-F9P for moving and rover positioning. I want to achieve positioning and orientation for a small vehicle with it. I use two ZED-F9Ps for interaction, as shown in the picture. How can I use this library to obtain GNSS position and the corresponding orientation of the two boards
https://content.u-blox.com/sites/default/files/documents/ZED-F9P-MovingBase_AppNote_UBX-19009093.pdf

Beta Was this translation helpful? Give feedback.
All reactions