1. LinuxCNC Overview:
- LinuxCNC is open-source software for controlling CNC machines.
- It runs on Linux with a real-time kernel for precise motor control.
- Commonly used for milling machines, lathes, 3D printers, and robotics.
2. CNC Machine Components:
- Stepper Motors or Servo Motors: Drives the machine's axes.
- Breakout Boards: Connects the PC (via parallel port or Mesa card) to motor drivers.
- Motor Drivers: Controls the current and direction to motors.
3. Parallel Port vs. Mesa Cards:
- Parallel Port: Simple, direct connection to motors using a breakout board.
- Mesa Cards: Provides more I/O ports, better performance, and Ethernet options for real-time control.
4. Real-time Kernel:
- LinuxCNC requires a real-time kernel (RT Kernel) to handle time-sensitive motor controls.
- A real-time kernel ensures consistent timing, critical for CNC precision.
5. INI File:
- Contains machine-specific settings like stepper motor speed, acceleration, axis configuration, and home positions.
- You define the machine’s characteristics here.
6. HAL (Hardware Abstraction Layer):
- Defines how software connects to hardware (motors, switches, sensors).
- You can map physical pins (parallel port or Mesa card) to machine functions (limit switches, step signals).
7. G-code:
- The language that controls CNC machines.
- Commands like G0, G1 (move commands), M3 (spindle on), and G28 (home the machine) are commonly used.
8. Configuration Wizard (Stepconf):
- A simple way to create a basic machine configuration.
- Helps set up axis settings, motor step rates, and pin assignments for parallel port connections.
9. Axis GUI:
- The graphical user interface (GUI) for LinuxCNC.
- Allows you to load G-code, jog axes, set zero positions, and run CNC jobs.
10. Simulation Mode:
- You can run LinuxCNC in simulation mode to learn the interface and run G-code without having a machine connected.
- Great for beginners to practice and learn before using a real CNC.
11. Using HALScope:
- A tool within LinuxCNC to visualize signals and timings.
- Helps in debugging and fine-tuning machine movements.
12. Homing & Limit Switches:
- Homing sets a known reference point for each axis.
- Limit switches stop the machine from overextending beyond its physical range.
13. Spindle Control:
- You can configure spindle speed and direction via G-code commands (e.g., M3, M4, M5).
14. LinuxCNC Documentation:
- [LinuxCNC.org](http://linuxcnc.org/docs/stable/html/) has detailed documentation and a helpful community forum.
- Provides tutorials, example configurations, and troubleshooting tips.
15. LinuxCNC Forum
This forum is an active community where you can:
- Ask questions about LinuxCNC setup, troubleshooting, and configuration.
- Share your CNC projects and solutions.
- Find detailed discussions about hardware (parallel ports, Mesa cards), software configurations (HAL, INI), and more.
- Explore beginner tutorials, advanced configurations, and real-world examples.
16. LinuxCNC buildbot
17. LinuxCNC install for Debian 12.5 Bookworm and Debian 13 Trixie
-----------------------------------------------------
------------ ArduinoConnector I have tried it. ------------
- This Project enables you to connect an Arduino to LinuxCNC and provides as many IO's as you could ever wish for.
- This Software is used as IO Expansion for LinuxCNC.
sudo pip install pyserial
Project Homepage: [https://github.com/pyserial/pyserial](https://github.com/pyserial/pyserial)
Download Page: [https://pypi.python.org/pypi/pyserial](https://pypi.python.org/pypi/pyserial)
------------
-----------------------------------------------------
-
Many older CNC machines use the parallel port for real-time control.
-
You can connect directly to a CNC machine using a breakout board and the parallel port on a PC running LinuxCNC.
-
Configure the parallel port pinout in the LinuxCNC configuration to match the CNC machine’s input/output.
-
reference:
-----------------------------------------------------
-
Mesa cards (e.g., 5i25, 7i76, etc.) are specialized hardware that provides enhanced real-time control over stepper motors and other CNC components.
-
It connects to LinuxCNC via PCI or Ethernet and offloads the real-time processing from the PC.
-
Mesa cards are a preferred option for professional setups as they provide more stable performance and additional I/O options.
-
reference:
-----------------------------------------------------
-
LinuxCNC can run on a Raspberry Pi, but real-time performance is limited. It can be used for less demanding setups or non-real-time tasks.
-
Use a Raspberry Pi with a Mesa card over Ethernet for better control.
-
A real-time kernel is required to achieve better timing accuracy.
-
reference:
raspberrypi_Parallel_Port
-
LinuxCNC-on-RPi_Git : https://github.com/scottalford75/LinuxCNC-on-RPi
-
[Study]https://forums.raspberrypi.com/viewtopic.php?t=341546
-
Scematics_PCB_CAD_Config
https://raw.githubusercontent.com/ChrisWag91/PI-LCNC/master/Graphics/F013_PI-LCNC_Concept.png
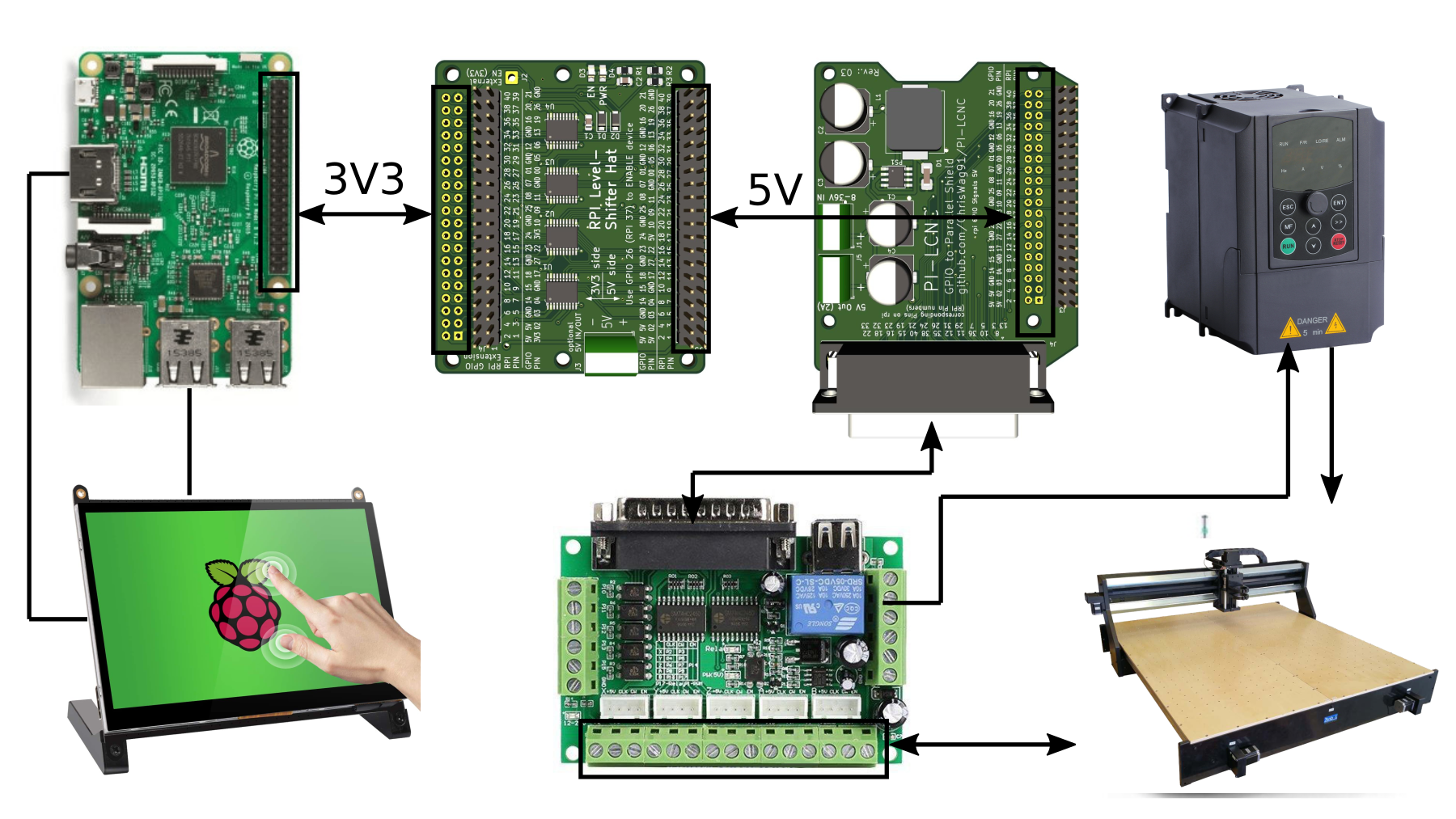{kind=link}
LinuxCNC on Raspberry Pi: How to Make It Work
wheretobuy:https://byte2bot.com/products/parallel-port-raspberry-pi-hat
https://byte2bot.com/blogs/instructions/setting-up-a-raspberry-pi https://byte2bot.com/products/cnc-serial-raspberry-pi-hat https://byte2bot.com/products/parallel-port-raspberry-pi-hat https://byte2bot.com/products/5-axis-cnc-interface-adapter-parallel-breakout-board-for-stepper-motor-drivers
-----------------------------------------------------
- External step generator and IO interface for LinuxCNC over Ethernet with dual-core ESP32 and W5500 modules.
- The hardware is connected to LinuxCNC over Ethernet. The controller operates in position mode at low speed and at higher speeds in velocity mode.
------------ First Method I have tried it. ------------
reference:
esp32-pinout:
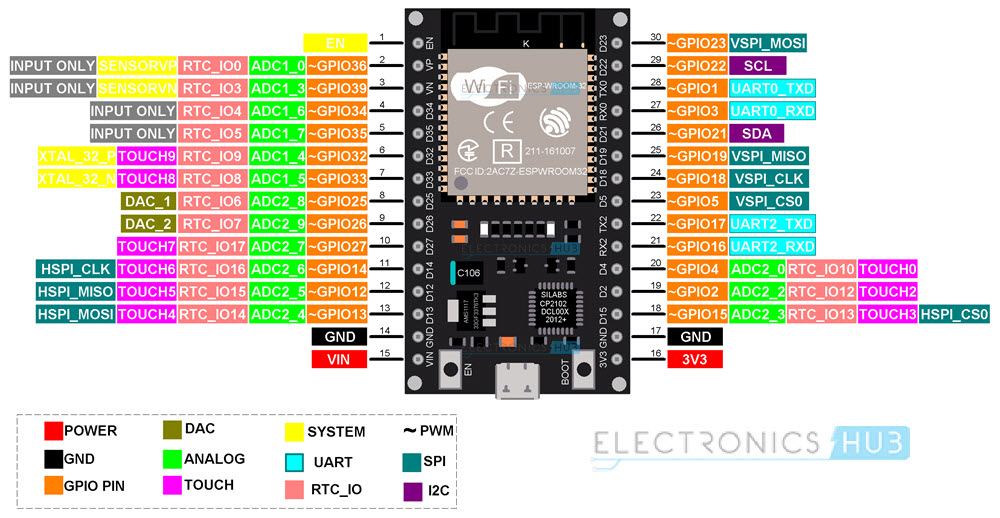{kind=link}
------------ Second Method Haven't tried it yet. ------------
------------ Third Method ------------
------------ Fourth Method ------------
------------ EXTRA Method ------------
https://github.com/dlhenke/linuxcnc-config
https://github.com/ldijkman/WT32-ETH01-LAN-8720-RJ45-
https://github.com/Xinyuan-LilyGO/LilyGO-T-ETH-Series
Other_Board_0 https://forum.linuxcnc.org/18-computer/39037-linuxcnc-orange-pi-allwincnc https://allwincnc.github.io/
extra video https://www.analog.com/en/product-category/motor-and-motion-control.html#c2378
Notes:
https://forum.linuxcnc.org/27-driver-boards/46770-driver-firmware-pcb-for-pi-rp2040-pio-i-e-an-easy-to-configure-fpga-like-card?start=10 https://linuxgizmos.com/wiznet-board-features-raspberry-pi-2040-and-hardwired-internet-controller-chip/
-----------------------------------------------------
Note
Each option has its own configuration needs within LinuxCNC’s INI and HAL files.