Output odom response does not match the step input #29
Comments
|
Yes, I am also facing this problem. Why the published velocity drops some time ?? below is my code |
|
That error can be fixed using the ros_planar_move_plugin, enabled by default. That option disables the Gazebo physics and the movement of the robot is exactly the one set on the cmd_vel. |
We tried with ros planar plugin as well, still it doesn't work.. Please clarify on this. |
|
If you use the "ros_planar_move_plugin:=true" argument, the velocity on the cmd_vel is exactly the same velocity on the odometry, ignoring all physics.
Could you download the simulation again and check if you are still having this problem? |

We are trying to move the SUMMIT XL in a straight line in gazebo. The differential drive plugin for wheel joints is enabled and we gave a step input velocity to robot and observed the output response from \odom topic.
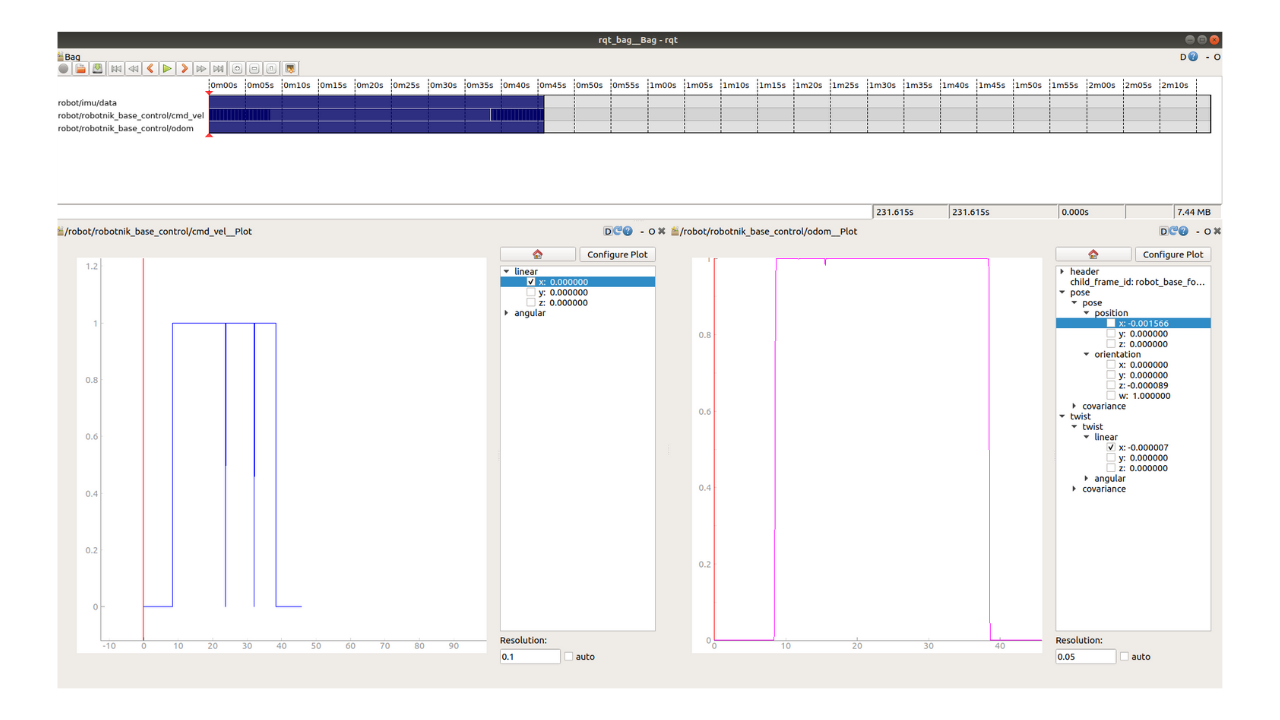
There are sudden dips/ falls in the output responses for a small period of time. The output response and step input are shown below:
Ideally, both the input and outputs must match, as we do the robot motion in a ideal simulation environment. Can anyone clarify why this discrepancy pops up?
The text was updated successfully, but these errors were encountered: