BiSeNet: Bilateral Segmentation Network for Real-time Semantic Segmentation
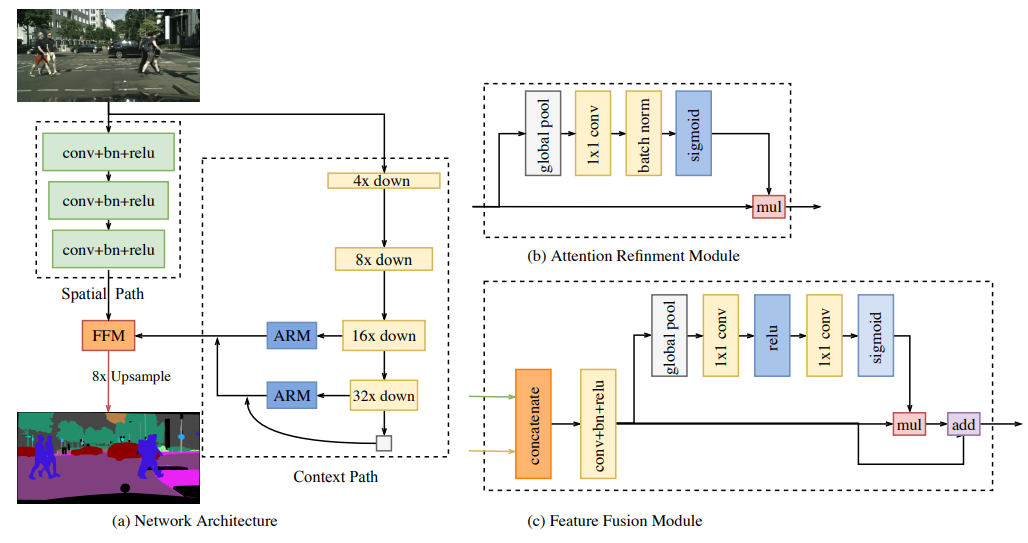
Semantic segmentation requires both rich spatial information and sizeable receptive field. However, modern approaches usually compromise spatial resolution to achieve real-time inference speed, which leads to poor performance. In this paper, we address this dilemma with a novel Bilateral Segmentation Network (BiSeNet). We first design a Spatial Path with a small stride to preserve the spatial information and generate high-resolution features. Meanwhile, a Context Path with a fast downsampling strategy is employed to obtain sufficient receptive field. On top of the two paths, we introduce a new Feature Fusion Module to combine features efficiently. The proposed architecture makes a right balance between the speed and segmentation performance on Cityscapes, CamVid, and COCO-Stuff datasets. Specifically, for a 2048x1024 input, we achieve 68.4% Mean IOU on the Cityscapes test dataset with speed of 105 FPS on one NVIDIA Titan XP card, which is significantly faster than the existing methods with comparable performance.
| Method | Backbone | Crop Size | Lr schd | Mem (GB) | Inf time (fps) | Device | mIoU | mIoU(ms+flip) | config | download |
|---|---|---|---|---|---|---|---|---|---|---|
| BiSeNetV1 | R-18-D32 (No Pretrain) | 1024x1024 | 160000 | 5.69 | 31.77 | V100 | 74.44 | 77.05 | config | model | log |
| BiSeNetV1 | R-18-D32 | 1024x1024 | 160000 | 5.69 | 31.77 | V100 | 74.37 | 76.91 | config | model | log |
| BiSeNetV1 | R-18-D32 (4x8) | 1024x1024 | 160000 | 11.17 | 31.77 | V100 | 75.16 | 77.24 | config | model | log |
| BiSeNetV1 | R-50-D32 (No Pretrain) | 1024x1024 | 160000 | 15.39 | 7.71 | V100 | 76.92 | 78.87 | config | model | log |
| BiSeNetV1 | R-50-D32 | 1024x1024 | 160000 | 15.39 | 7.71 | V100 | 77.68 | 79.57 | config | model | log |
| Method | Backbone | Crop Size | Lr schd | Mem (GB) | Inf time (fps) | Device | mIoU | mIoU(ms+flip) | config | download |
|---|---|---|---|---|---|---|---|---|---|---|
| BiSeNetV1 | R-18-D32 (No Pretrain) | 512x512 | 160000 | - | - | V100 | 25.45 | 26.15 | config | model | log |
| BiSeNetV1 | R-18-D32 | 512x512 | 160000 | 6.33 | 74.24 | V100 | 28.55 | 29.26 | config | model | log |
| BiSeNetV1 | R-50-D32 (No Pretrain) | 512x512 | 160000 | - | - | V100 | 29.82 | 30.33 | config | model | log |
| BiSeNetV1 | R-50-D32 | 512x512 | 160000 | 9.28 | 32.60 | V100 | 34.88 | 35.37 | config | model | log |
| BiSeNetV1 | R-101-D32 (No Pretrain) | 512x512 | 160000 | - | - | V100 | 31.14 | 31.76 | config | model | log |
| BiSeNetV1 | R-101-D32 | 512x512 | 160000 | 10.36 | 25.25 | V100 | 37.38 | 37.99 | config | model | log |
Note:
4x8: Using 4 GPUs with 8 samples per GPU in training.- For BiSeNetV1 on Cityscapes dataset, default setting is 4 GPUs with 4 samples per GPU in training.
No Pretrainmeans the model is trained from scratch.
@inproceedings{yu2018bisenet,
title={Bisenet: Bilateral segmentation network for real-time semantic segmentation},
author={Yu, Changqian and Wang, Jingbo and Peng, Chao and Gao, Changxin and Yu, Gang and Sang, Nong},
booktitle={Proceedings of the European conference on computer vision (ECCV)},
pages={325--341},
year={2018}
}