Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman's C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
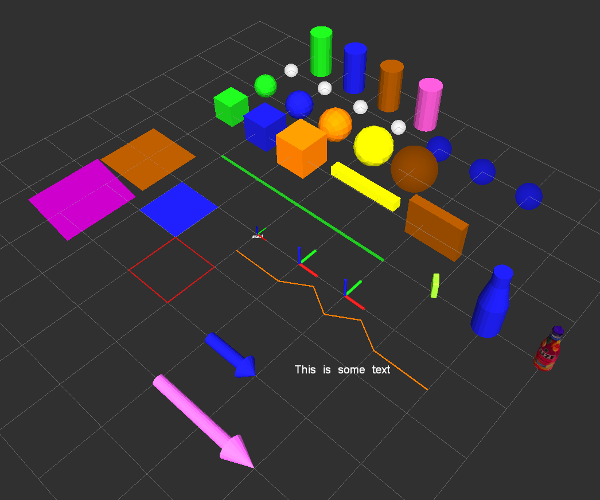
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py